下载后可任意编辑实验 1 光电传感器测小车转速1 实验目的1.观察了解光电传感器
2.测试光电传感器的应变输出
计数公式:轮子直径*3
14/20 格码盘=6
14/20 约=1cm 2 实验原理 本实验说明光电传感器的原理和工作情况
光电传感器由敏感元件、转换元件、基本转换电路三部分组成
它把光型号转换成为电信号,直接检测来自物体的辐射信息,也可以转换其它物理量成为光信号
其主要的原理是光电效应
当光照射到物质上的时候,物质上的电效应发生改变,这里的电效应宝库奥电子发射、电导率和电位电流等
然后通过类似光敏电阻这样的器件把光能转化成为电能,然后通过放大和去噪声处理就得到了所需要的输出信号
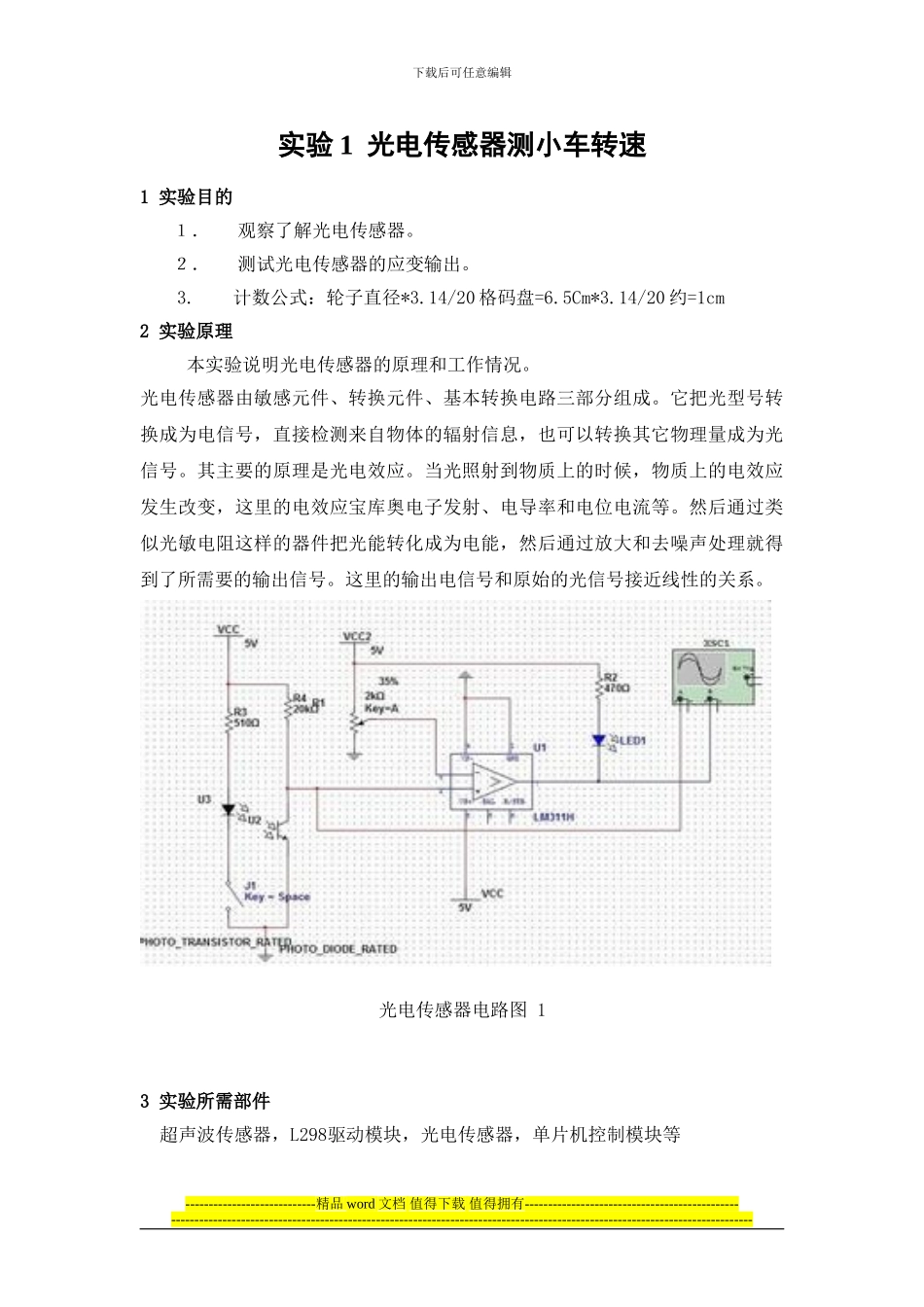
这里的输出电信号和原始的光信号接近线性的关系
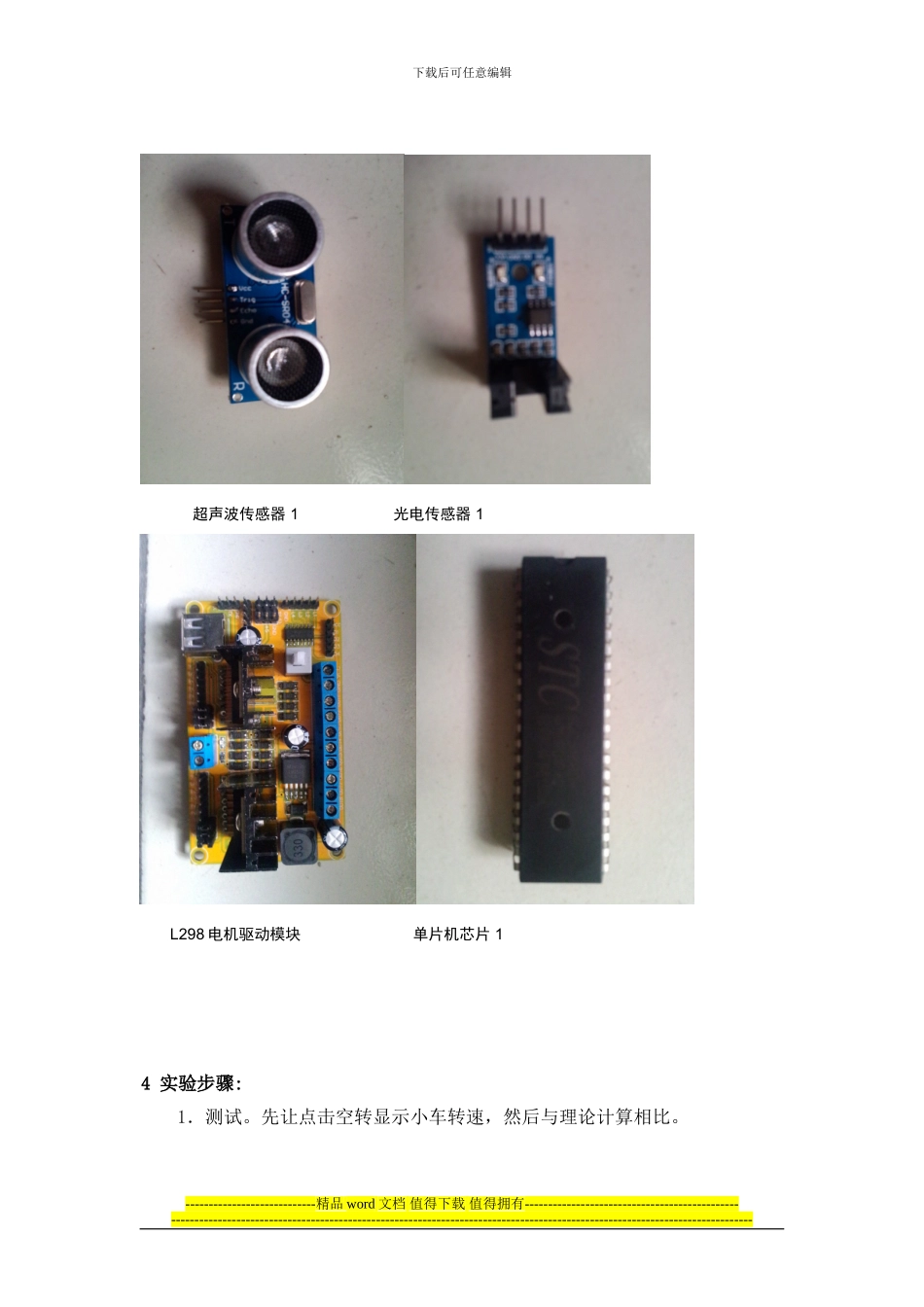
光电传感器电路图 13 实验所需部件 超声波传感器,L298驱动模块,光电传感器,单片机控制模块等----------------------------精品 word 文档 值得下载 值得拥有---------------------------------------------------------------------------------------------------------------------------------------------------------------------------下载后可任意编辑 超声波传感器 1 光电传感器 1 L298 电机驱动模块 单片机芯片 14 实验步骤:1.测试
先让点击空转显示小车转速,然后与理论计算相比
----------------------------精品 word 文档 值得下载 值得拥有------------------------------------------------------------------------