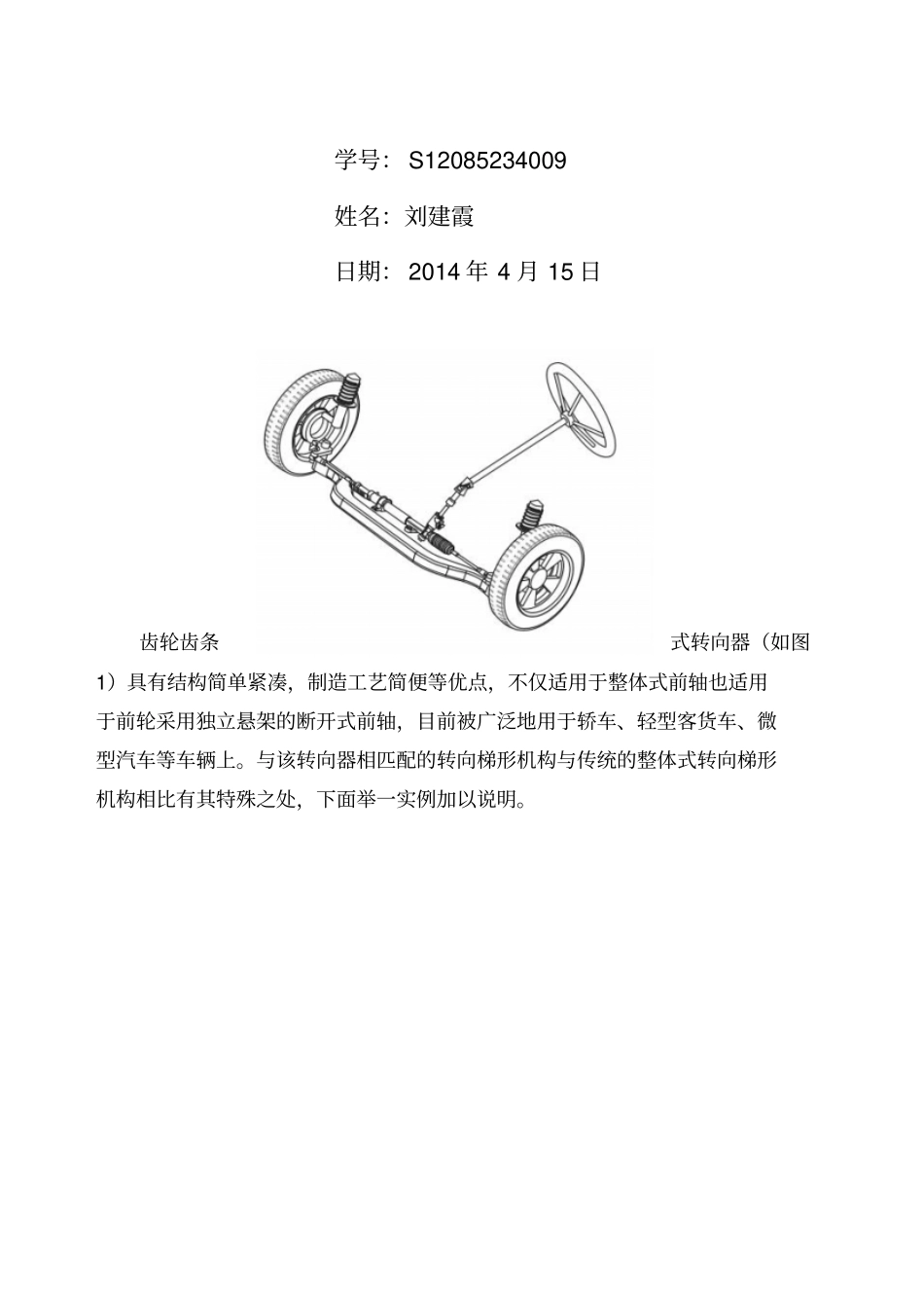
齿轮齿条式转向梯形的优化设计学院:车辆与能源学院专业: 2012 级车辆工程学号: S12085234009 姓名:刘建霞日期: 2014 年 4 月 15 日齿轮齿条式转向器(如图1)具有结构简单紧凑,制造工艺简便等优点,不仅适用于整体式前轴也适用于前轮采用独立悬架的断开式前轴,目前被广泛地用于轿车、轻型客货车、微型汽车等车辆上
与该转向器相匹配的转向梯形机构与传统的整体式转向梯形机构相比有其特殊之处,下面举一实例加以说明
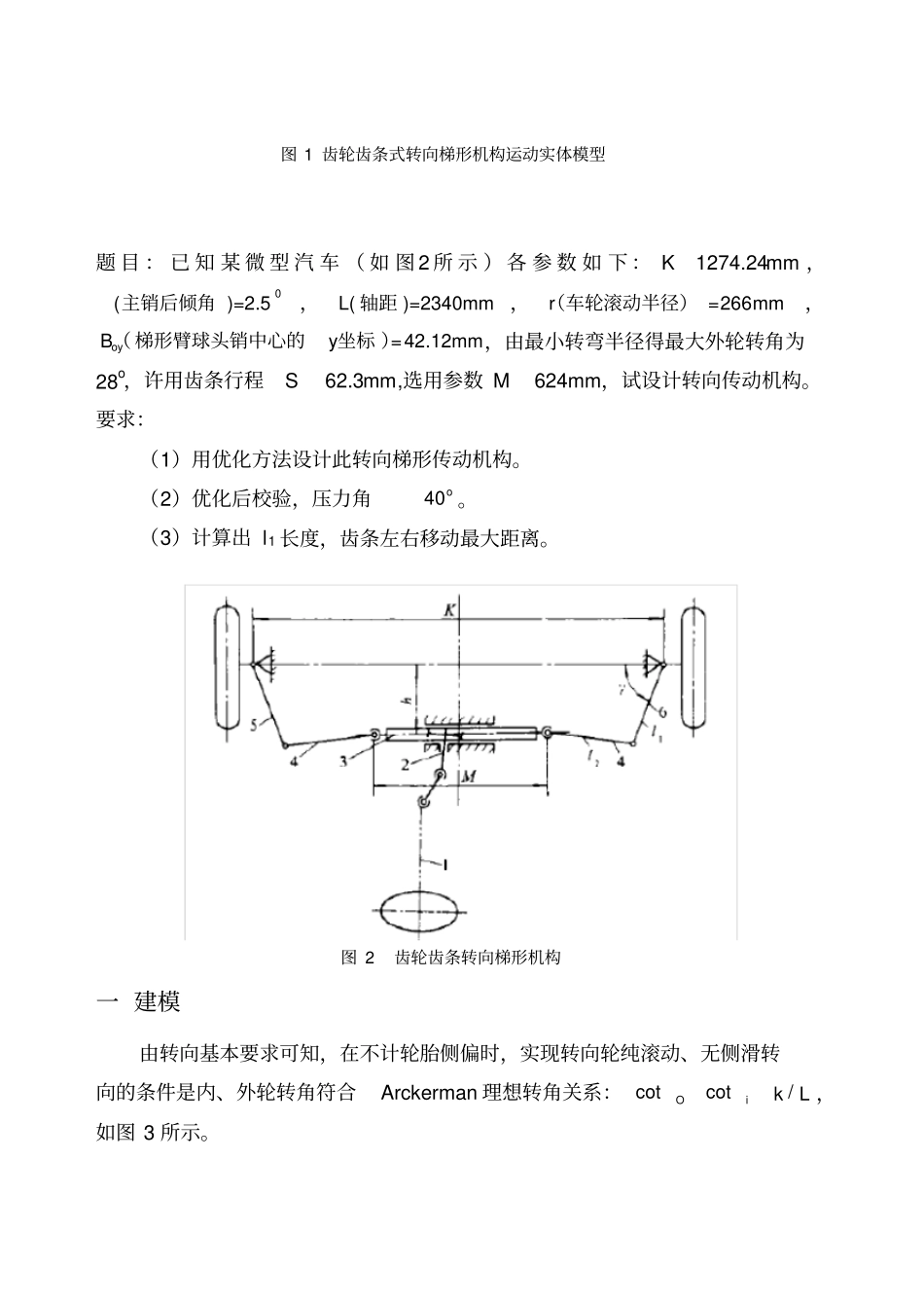
图 1 齿轮齿条式转向梯形机构运动实体模型题 目 : 已 知 某 微 型 汽 车 ( 如 图 2 所 示 ) 各 参 数 如 下 :1274
24Kmm ,0()=2
5主销后倾角,L( 轴距 )=2340mm ,=mmr(车轮滚动半径)266,=oyBy梯形臂球头销中心的() 42坐标
12mm,由最小转弯半径得最大外轮转角为28o,许用齿条行程62
3Smm,选用参数624Mmm,试设计转向传动机构
要求:(1)用优化方法设计此转向梯形传动机构
(2)优化后校验,压力角40o
(3)计算出 l1 长度,齿条左右移动最大距离
图 2 齿轮齿条转向梯形机构一 建模由转向基本要求可知,在不计轮胎侧偏时,实现转向轮纯滚动、无侧滑转向的条件是内、外轮转角符合Arckerman 理想转角关系: cotcot/OikL ,如图 3 所示
图 3 理想的内外轮转角关系(1)设计变量:选取变量1( , ,)Xlh图 4 外轮一侧杆系运动情况由图 4 内外轮转角的关系得:221o21ol cos(r)l[sin()h]2KMSlr(1)SMKh22arctan(2) 12 221222221)2(2)2(arccoshSMKllhSMKl(3) ir(4) 联立上式可得o()ig的函数关系式
对于给定的汽车和选定的转向器,转向梯形机构有横拉杆长l 1和梯形臂长m 两