1 交流异步电机矢量控制系统调试总结报告 本次设计交流异步电机矢量控制系统用于上海交通大学纯电动汽车
电机驱动控制器设计制作于7 月18 号完成,调试时间为7 月6 号至8 月12 号
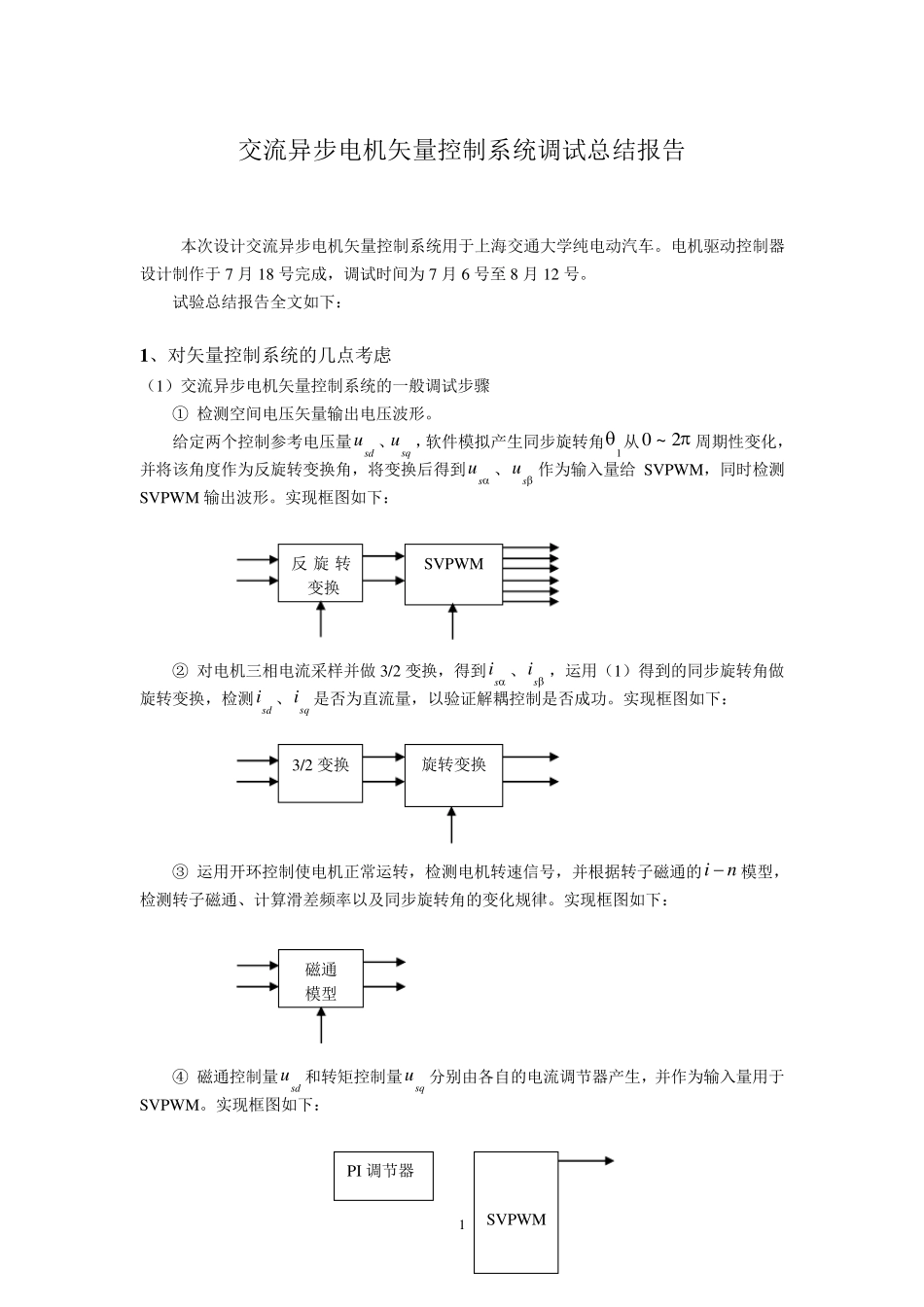
试验总结报告全文如下: 1 、对矢量控制系统的几点考虑 (1)交流异步电机矢量控制系统的一般调试步骤 ① 检测空间电压矢量输出电压波形
给定两个控制参考电压量sdu、squ,软件模拟产生同步旋转角1 从2~0周期性变化,并将该角度作为反旋转变换角,将变换后得到su、su作为输入量给 SVPWM,同时检测SVPWM 输出波形
实现框图如下: ② 对电机三相电流采样并做 3/2 变换,得到si、si,运用(1)得到的同步旋转角做旋转变换,检测sdi、sqi是否为直流量,以验证解耦控制是否成功
实现框图如下: ③ 运用开环控制使电机正常运转,检测电机转速信号,并根据转子磁通的ni 模型,检测转子磁通、计算滑差频率以及同步旋转角的变化规律
实现框图如下: ④ 磁通控制量sdu和转矩控制量squ分别由各自的电流调节器产生,并作为输入量用于SVPWM
实现框图如下: 反 旋 转变换 SVPWM 3/2 变换 旋转变换 磁通 模型 PI 调节器 SVPWM 2 (2)矢量控制系统中电机磁路饱和对磁场定向的影响 磁路饱和是由于电感随电机定子电流过大增大而发生变化,使得磁通与励磁电流之间不再保持线性关系,当励磁电流达到一定值时,磁通出现增加缓慢,产生饱和
① 对转子磁通的影响 磁场定向下,转子磁通: mrmrisTL 1 标准电机设计时,一般取:semii6
0,sei 为额定工况下定子相电流有效值
为了提高r 的额定值,可以适当降低滑差频率,有利于电机的稳定运行
由于受磁路饱和的影响,转子磁通不能太高
当给定转子磁通超过饱和磁通时,就会破坏转子磁通定向