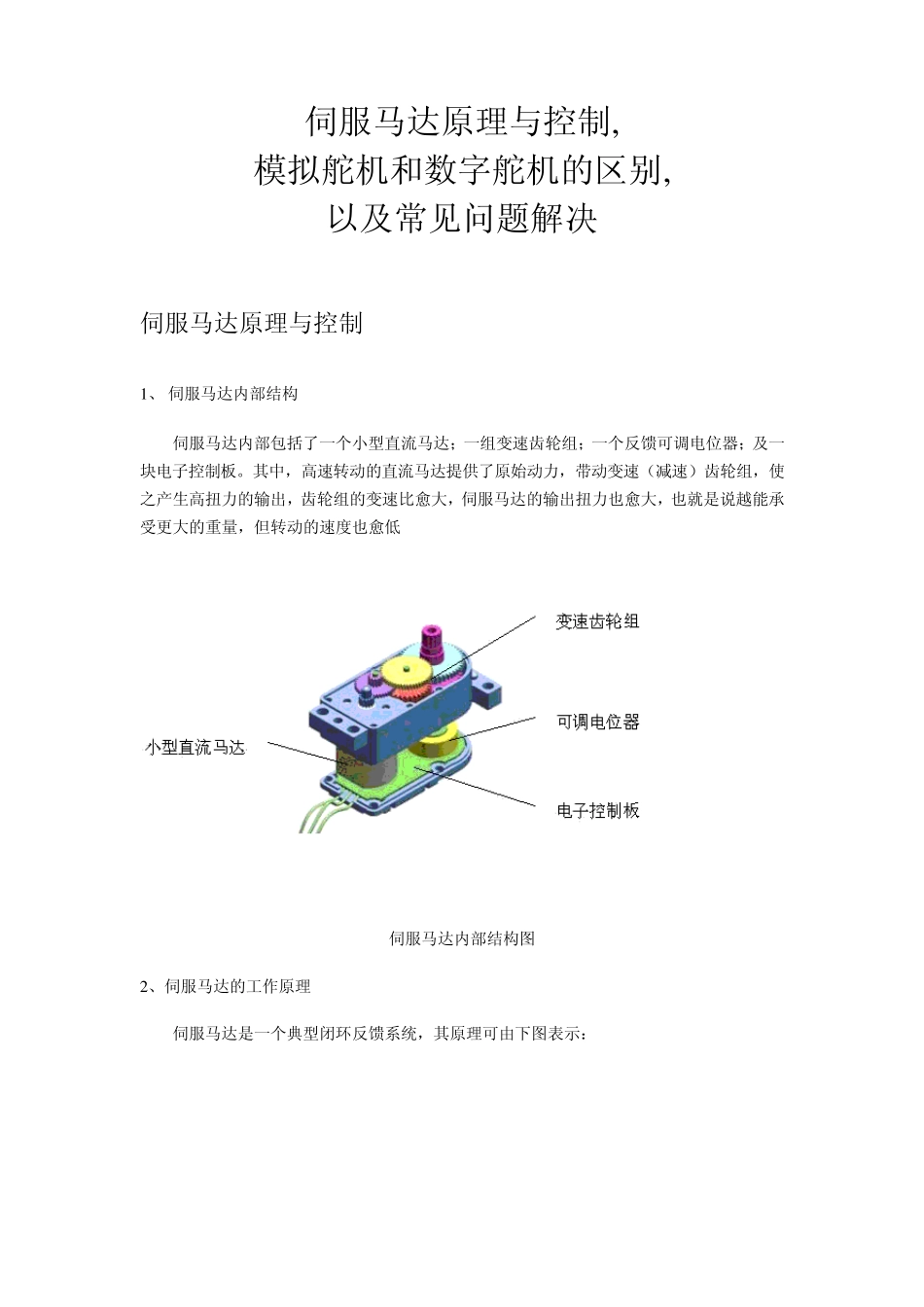
伺服马达原理与控制, 模拟舵机和数字舵机的区别, 以及常见问题解决 伺服马达原理与控制 1 、 伺服马达内部结构 伺服马达内部包括了一个小型直流马达;一组变速齿轮组;一个反馈可调电位器;及一块电子控制板
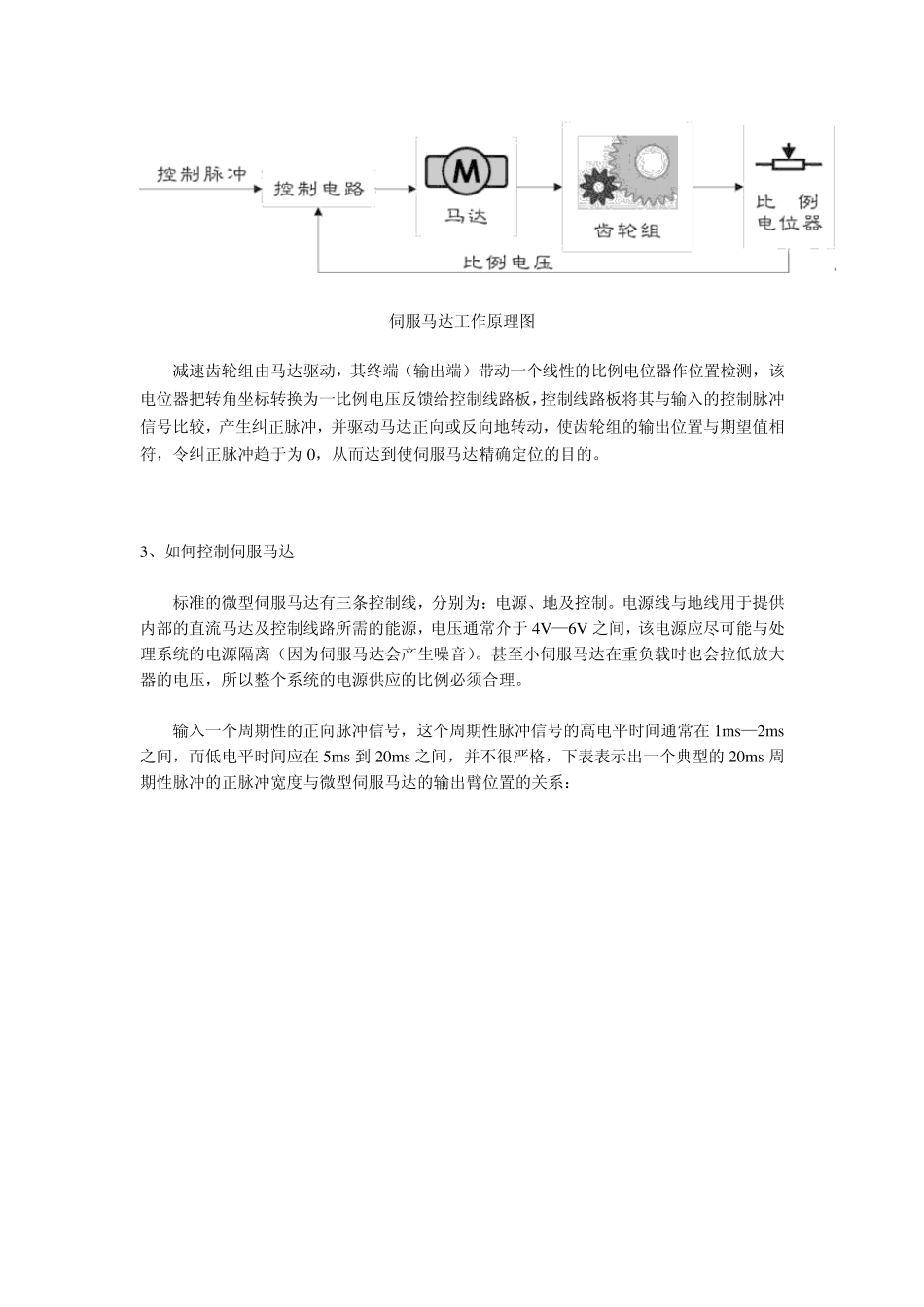
其中,高速转动的直流马达提供了原始动力,带动变速(减速)齿轮组,使之产生高扭力的输出,齿轮组的变速比愈大,伺服马达的输出扭力也愈大,也就是说越能承受更大的重量,但转动的速度也愈低 伺服马达内部结构图 2 、伺服马达的工作原理 伺服马达是一个典型闭环反馈系统,其原理可由下图表示: 伺服马达工作原理图 减速齿轮组由马达驱动,其终端(输出端)带动一个线性的比例电位器作位置检测,该电位器把转角坐标转换为一比例电压反馈给控制线路板,控制线路板将其与输入的控制脉冲信号比较,产生纠正脉冲,并驱动马达正向或反向地转动,使齿轮组的输出位置与期望值相符,令纠正脉冲趋于为0,从而达到使伺服马达精确定位的目的
3、如何控制伺服马达 标准的微型伺服马达有三条控制线,分别为:电源、地及控制
电源线与地线用于提供内部的直流马达及控制线路所需的能源,电压通常介于4V—6V 之间,该电源应尽可能与处理系统的电源隔离(因为伺服马达会产生噪音)
甚至小伺服马达在重负载时也会拉低放大器的电压,所以整个系统的电源供应的比例必须合理
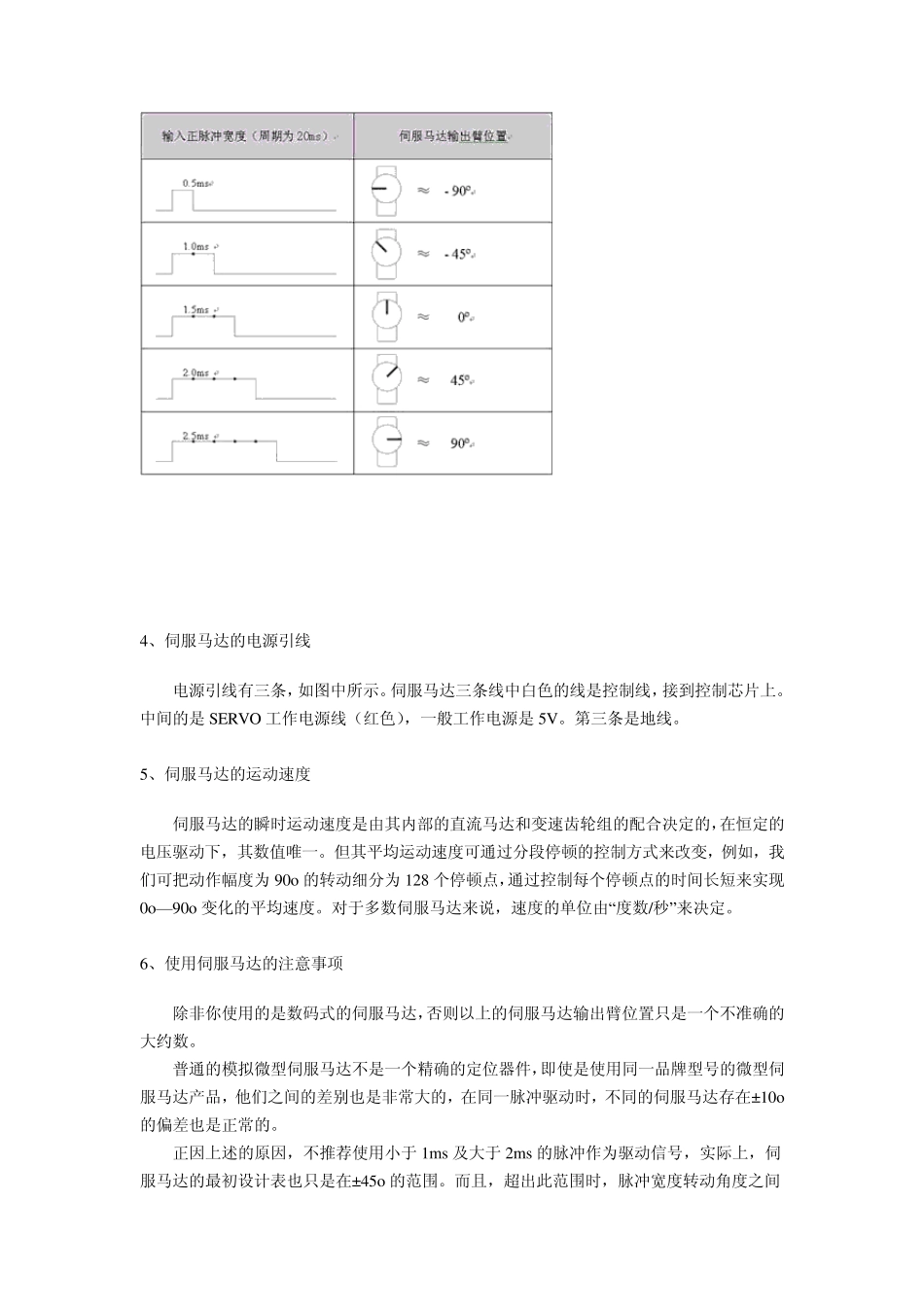
输入一个周期性的正向脉冲信号,这个周期性脉冲信号的高电平时间通常在 1ms—2ms之间,而低电平时间应在 5ms到20ms之间,并不很严格,下表表示出一个典型的20ms周期性脉冲的正脉冲宽度与微型伺服马达的输出臂位置的关系: 4、伺服马达的电源引线 电源引线有三条,如图中所示
伺服马达三条线中白色的线是控制线,接到控制芯片上
中间的是 SERVO 工作电源线(红色),一般工作电源是 5V
第三条是地线
5、伺服马达的运动速度 伺服马达的瞬时运动速度是由其内部的直流马达和变速齿轮组的