焊接机器人的结构设计及智能化发展研究-机电论文焊接机器人的结构设计及智能化发展研究杨仁 郝云卿 马嵩 宋冠儒(大连理工大学机械工程学院,辽宁大连 116024 )摘要:目前较多企业开始采用通用的工业焊接机器人完成各种复杂的焊接任务,但是主要针对焊缝种类较为单一的情况
现分析传统焊接机器人的基本特点,然后从机械设计和焊接智能化控制等方面阐述焊接机器人的智能化发展方向
关键词:焊接机器人;自由度;工作站;智能化 0 引言焊接是一种重要的加工工艺方法,是现代制造工艺的重要组成部分
由于焊接作业环境恶劣,产生强烈的弧光会对人眼造成伤害,并且待焊零件构型复杂多变,故传统的手工焊接作业及其焊接质量难以满足现代高技术产品制造的要求
随着计算机技术、自动控制技术的发展和应用,焊接机器人在制造业中得到了广泛的应用,提高了焊接质量和焊接效率,改善了工人的工作环境
然而,由于作业环境及任务的复杂性不断增加,一般的工业焊接机器人很难灵活、自动避障地完成焊接任务,这就对焊接机器人的自动化、柔性化和智能化提出了更高的技术要求
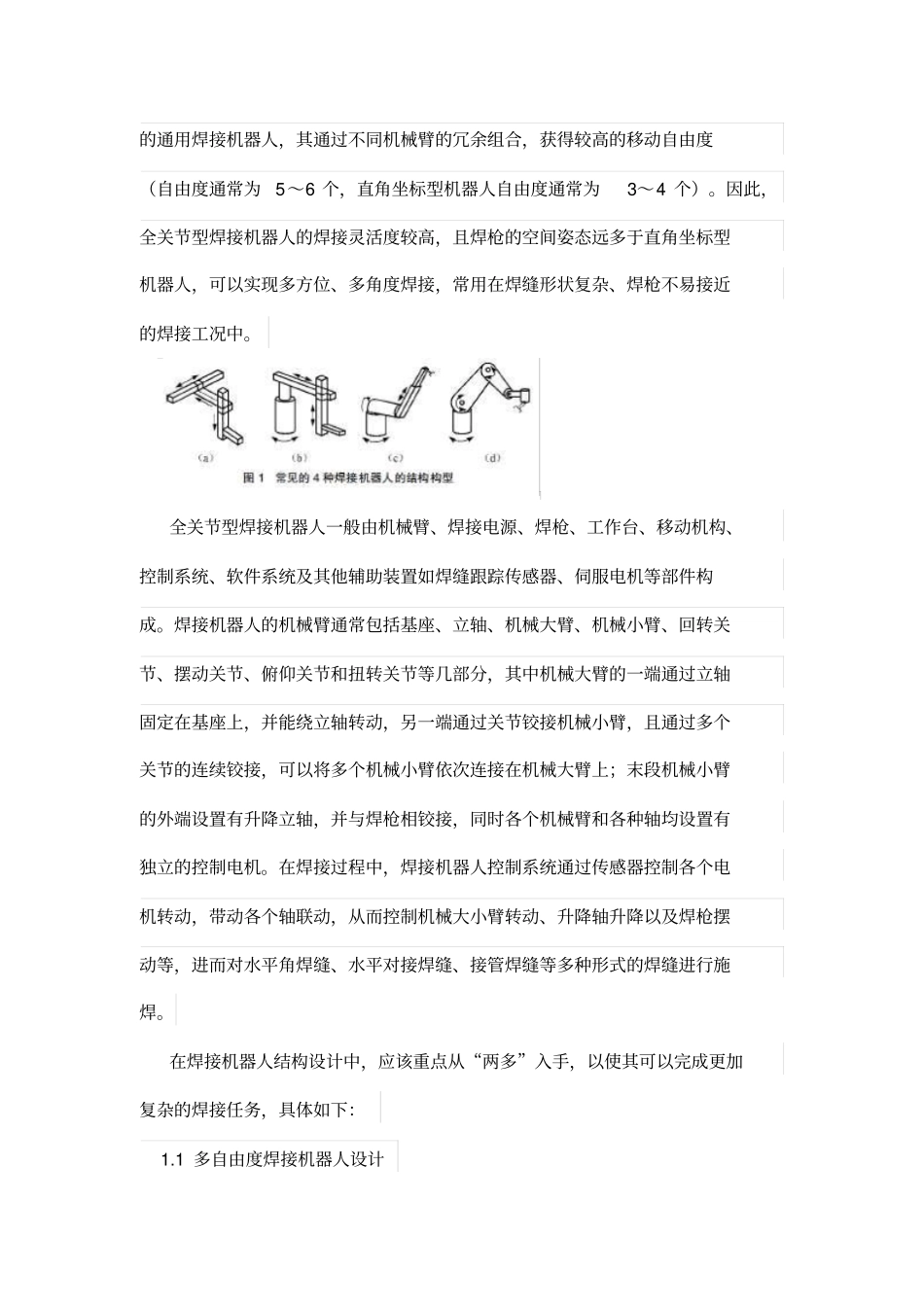
1 焊接机器人的结构设计目前,市场上常见的焊接机器人主要有直角坐标型、圆柱坐标型、球坐标型和链式坐标型(全关节型)4 种类型,其结构构型示意图依次如图1(a)~(d )所示
其中,全关节型焊接机器人,又称作机械手臂,是焊接生产线上的通用焊接机器人,其通过不同机械臂的冗余组合,获得较高的移动自由度(自由度通常为5~6 个,直角坐标型机器人自由度通常为3~4 个)
因此,全关节型焊接机器人的焊接灵活度较高,且焊枪的空间姿态远多于直角坐标型机器人,可以实现多方位、多角度焊接,常用在焊缝形状复杂、焊枪不易接近的焊接工况中
全关节型焊接机器人一般由机械臂、焊接电源、焊枪、工作台、移动机构、控制系统、软件系统及其他辅助装置如焊缝跟踪传感器、伺服电机等部件构成
焊接机器人的机械臂通常包括基座