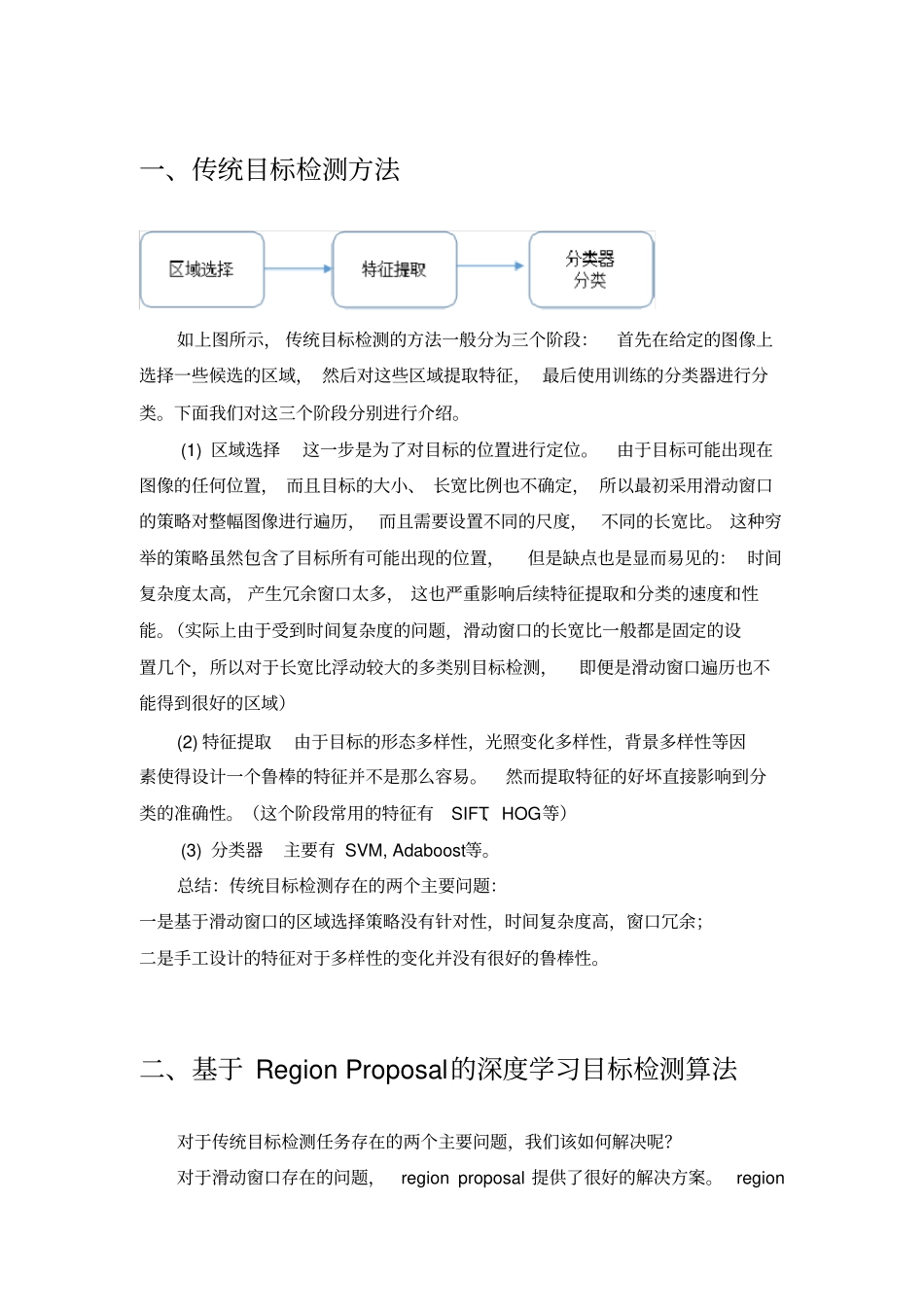
一、传统目标检测方法如上图所示, 传统目标检测的方法一般分为三个阶段:首先在给定的图像上选择一些候选的区域, 然后对这些区域提取特征, 最后使用训练的分类器进行分类
下面我们对这三个阶段分别进行介绍
(1) 区域选择这一步是为了对目标的位置进行定位
由于目标可能出现在图像的任何位置, 而且目标的大小、 长宽比例也不确定, 所以最初采用滑动窗口的策略对整幅图像进行遍历, 而且需要设置不同的尺度, 不同的长宽比
这种穷举的策略虽然包含了目标所有可能出现的位置,但是缺点也是显而易见的: 时间复杂度太高, 产生冗余窗口太多, 这也严重影响后续特征提取和分类的速度和性能
(实际上由于受到时间复杂度的问题,滑动窗口的长宽比一般都是固定的设置几个,所以对于长宽比浮动较大的多类别目标检测,即便是滑动窗口遍历也不能得到很好的区域)(2) 特征提取由于目标的形态多样性,光照变化多样性,背景多样性等因素使得设计一个鲁棒的特征并不是那么容易
然而提取特征的好坏直接影响到分类的准确性
(这个阶段常用的特征有SIFT、HOG等)(3) 分类器主要有 SVM, Adaboost等
总结:传统目标检测存在的两个主要问题:一是基于滑动窗口的区域选择策略没有针对性,时间复杂度高,窗口冗余;二是手工设计的特征对于多样性的变化并没有很好的鲁棒性
二、基于 Region Proposal的深度学习目标检测算法对于传统目标检测任务存在的两个主要问题,我们该如何解决呢
对于滑动窗口存在的问题,region proposal 提供了很好的解决方案
region proposal(候选区域)是预先找出图中目标可能出现的位置
但由于 region proposal利用了图像中的纹理、边缘、颜色等信息,可以保证在选取较少窗口(几千个甚至几百个)的情况下保持较高的召回率
这大大降低了后续操作的时间复杂度,并且获取的候选窗口