第六章 校正知识点:1、校正方式的分类串联校正,前馈校正,反馈校正,复合校正2、控制规律的分类PID,P,PI,PD 3、串联校正的 3 种类型超前校正,滞后校正,滞后— 超前校正4、串 联 超 前 校 正 的 实 质 是 : 利 用 超 前 相 位 角m 增 大 相 角 裕 度 , 利 用10lga+L(wc’’)=0, 使校正后系统截止频率增加,改善系统的动态特性
5、串联滞后校正的实质是: 利用 20lgb +L(w c’’ )=0,使校正后系统 截止频率减小,同时也提高相角裕度
提高了高频抗干扰性能,也改善了原系统的低频段, 提高了系统稳态精度
6、串联滞后超前校正的实质是: 超前部分,在新的截止频率处增大了相角裕量;滞后部分,在低频段上增大了改善了稳态精度
7、PID 控制器的传递函数1( )pidG sKKK ss8、PID 校正控制在工业控制系统中应用广泛,通常应使I 部分发生在系统频率特性的低频段,以提高系统的稳态性能;使D 部分发生在系统频率特性的中 频段,以提高系统的动态性能
9、超前校正的步骤10、滞后校正的步骤11、滞后超前校正的步骤12、期望特性校正法的步骤13、复合校正(按输入进行补偿,按扰动进行补偿)例题
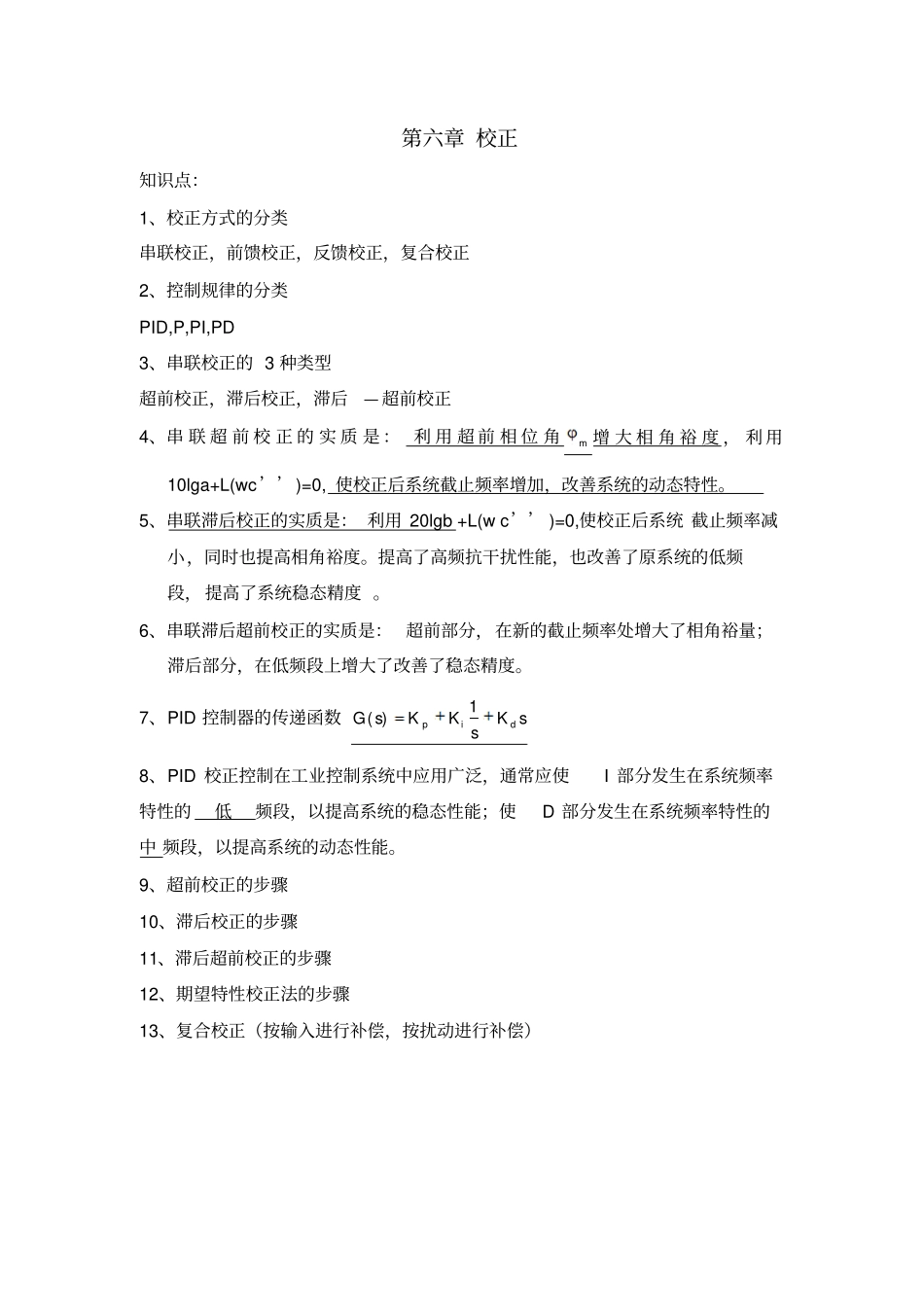
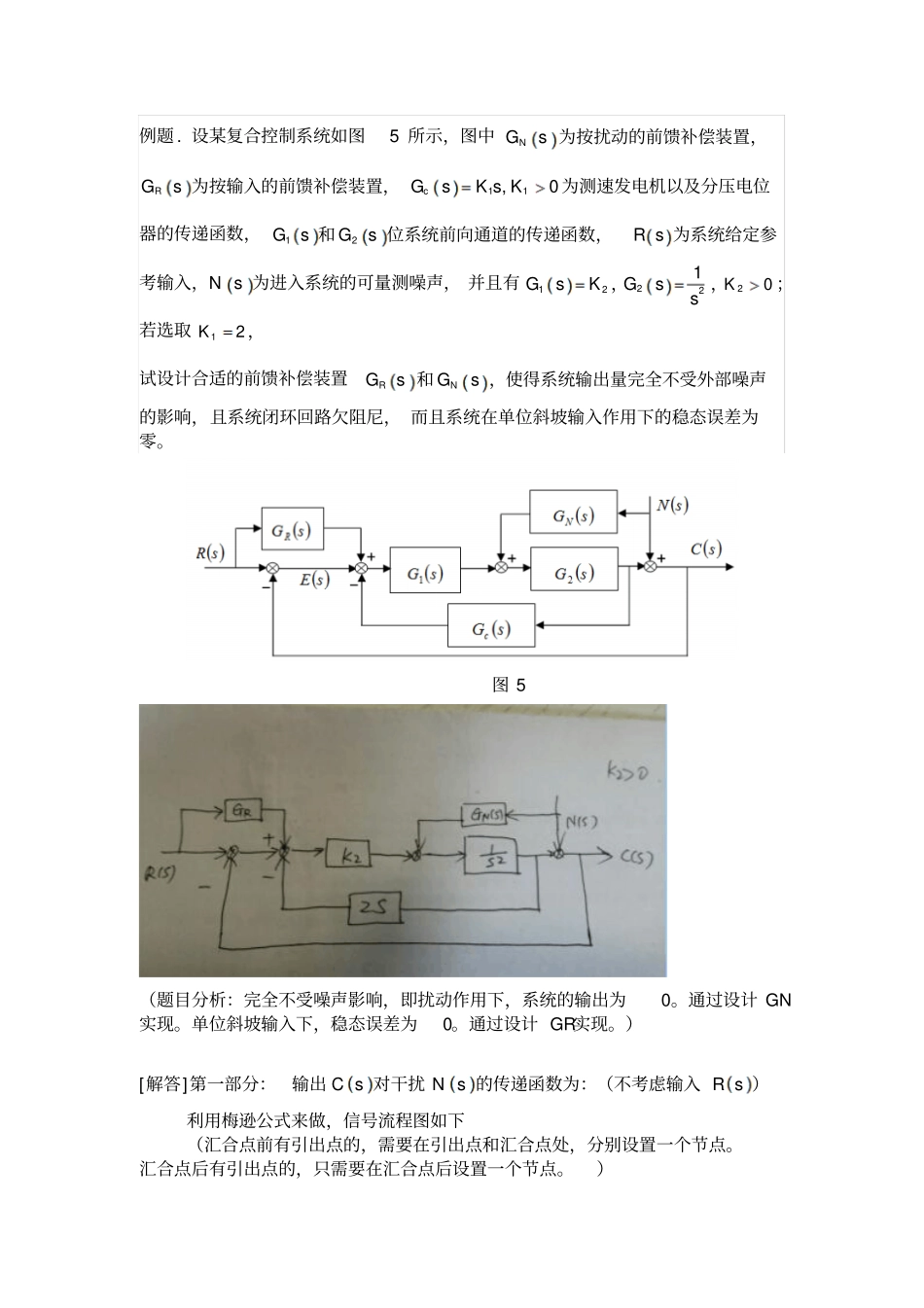
设某复合控制系统如图5 所示,图中NGs 为按扰动的前馈补偿装置,RGs 为按输入的前馈补偿装置,11,0cGsK s K为测速发电机以及分压电位器的传递函数,1Gs 和2Gs 位系统前向通道的传递函数,R s 为系统给定参考输入,N s 为进入系统的可量测噪声, 并且有12GsK ,221Gss,20K;若选取12K,试设计合适的前馈补偿装置RGs 和NGs ,使得系统输出量完全不受外部噪声的影响,且系统闭环回路欠阻尼, 而且系统在单位斜坡输入作用下的稳态误差为零
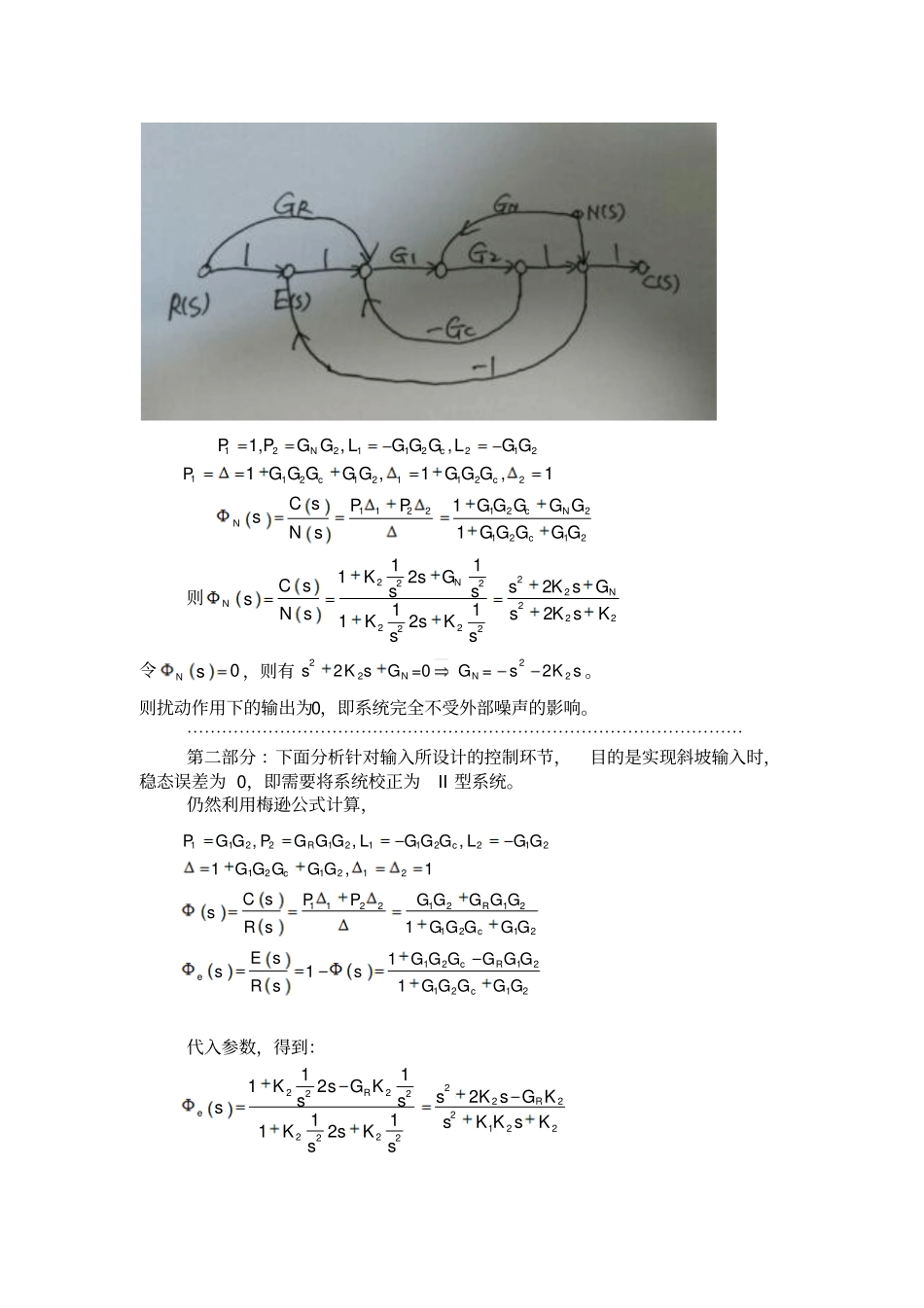
图 5 (题目分析:完全不受噪声影响,即扰动作用下,系统的输出为0