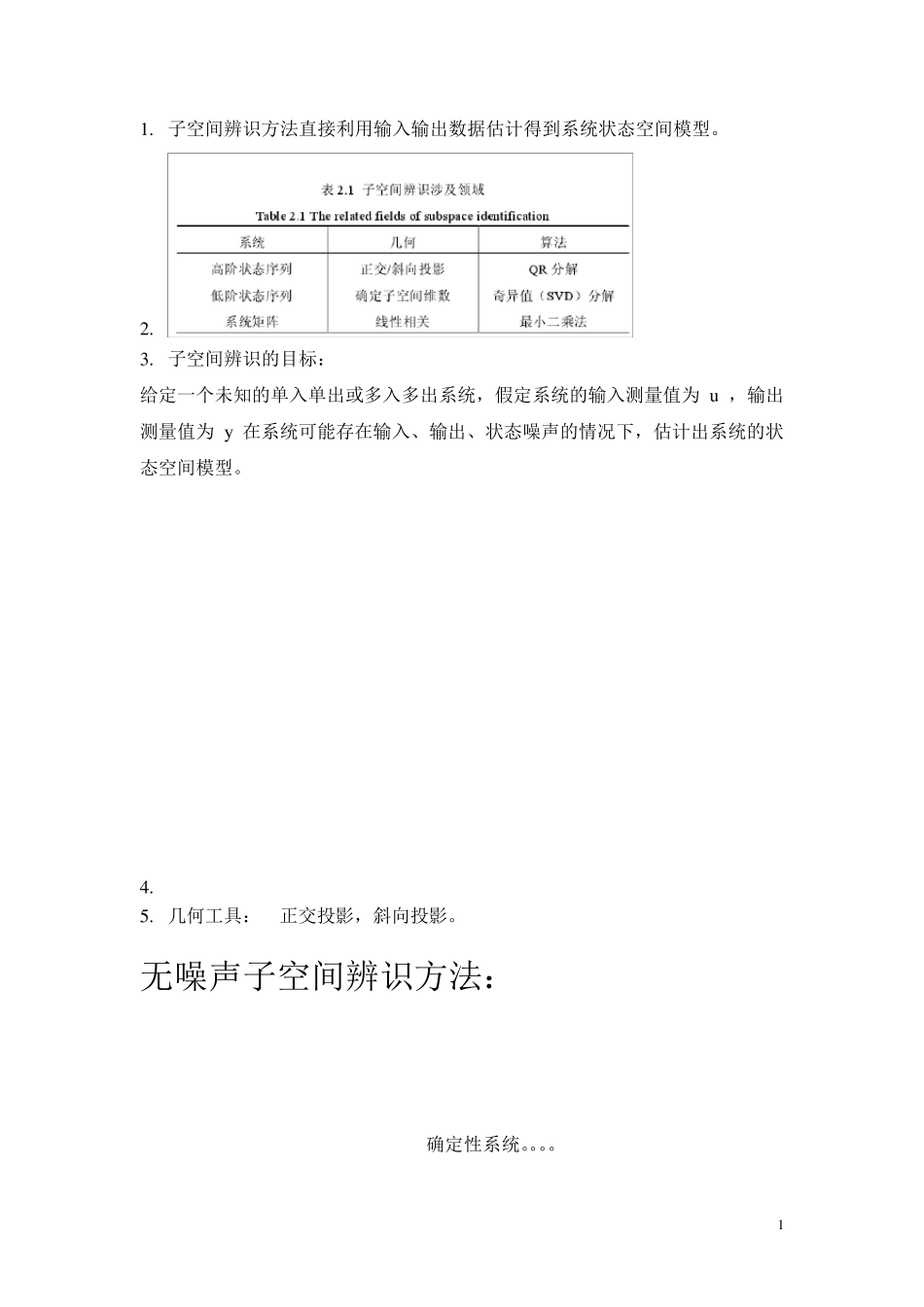
子空间辨识方法直接利用输入输出数据估计得到系统状态空间模型
子空间辨识的目标: 给定一个未知的单入单出或多入多出系统,假定系统的输入测量值为u ,输出测量值为 y 在系统可能存在输入、输出、状态噪声的情况下,估计出系统的状态空间模型
几何工具: 正交投影,斜向投影
无噪声子空间辨识方法: 确定性系统
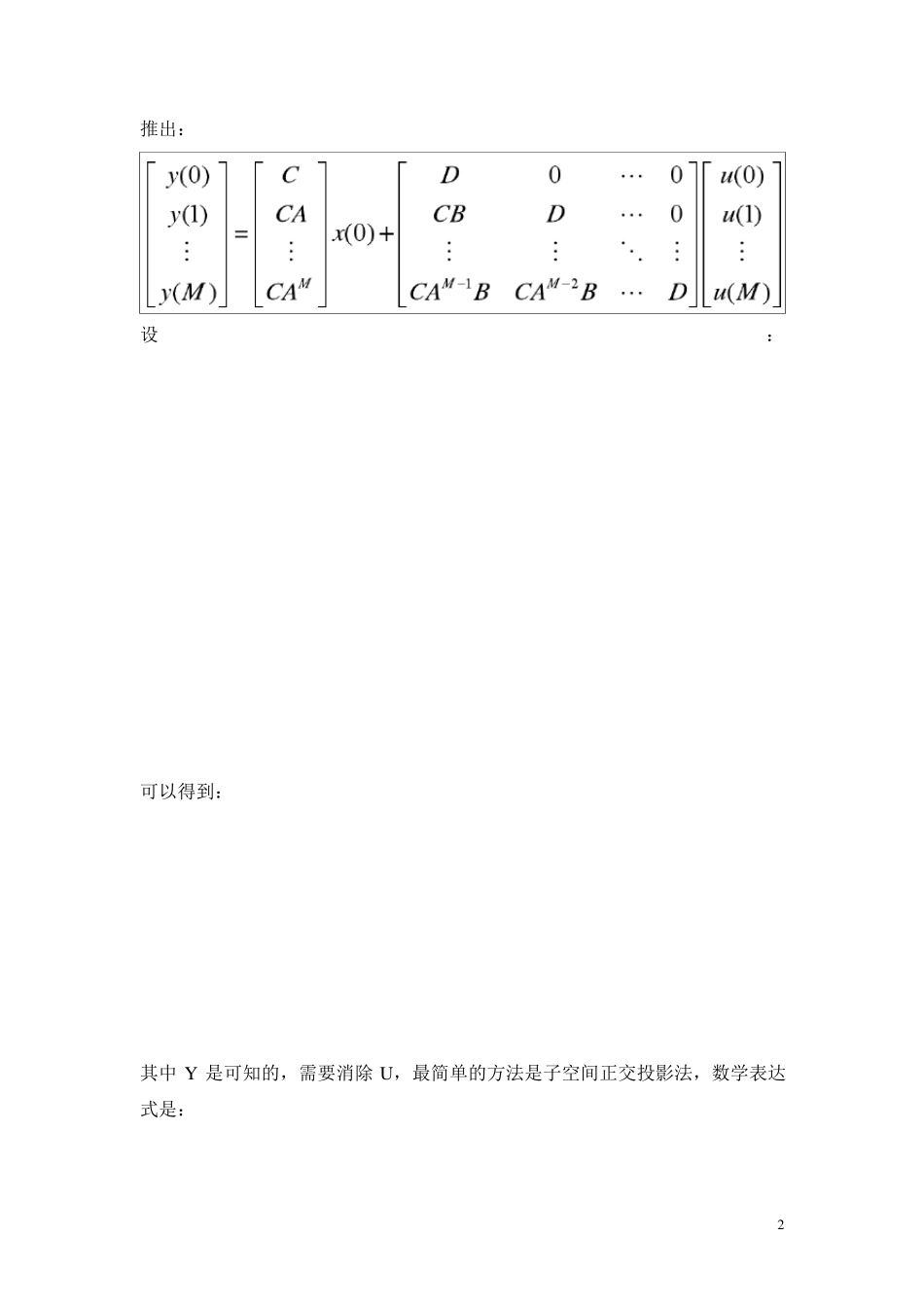
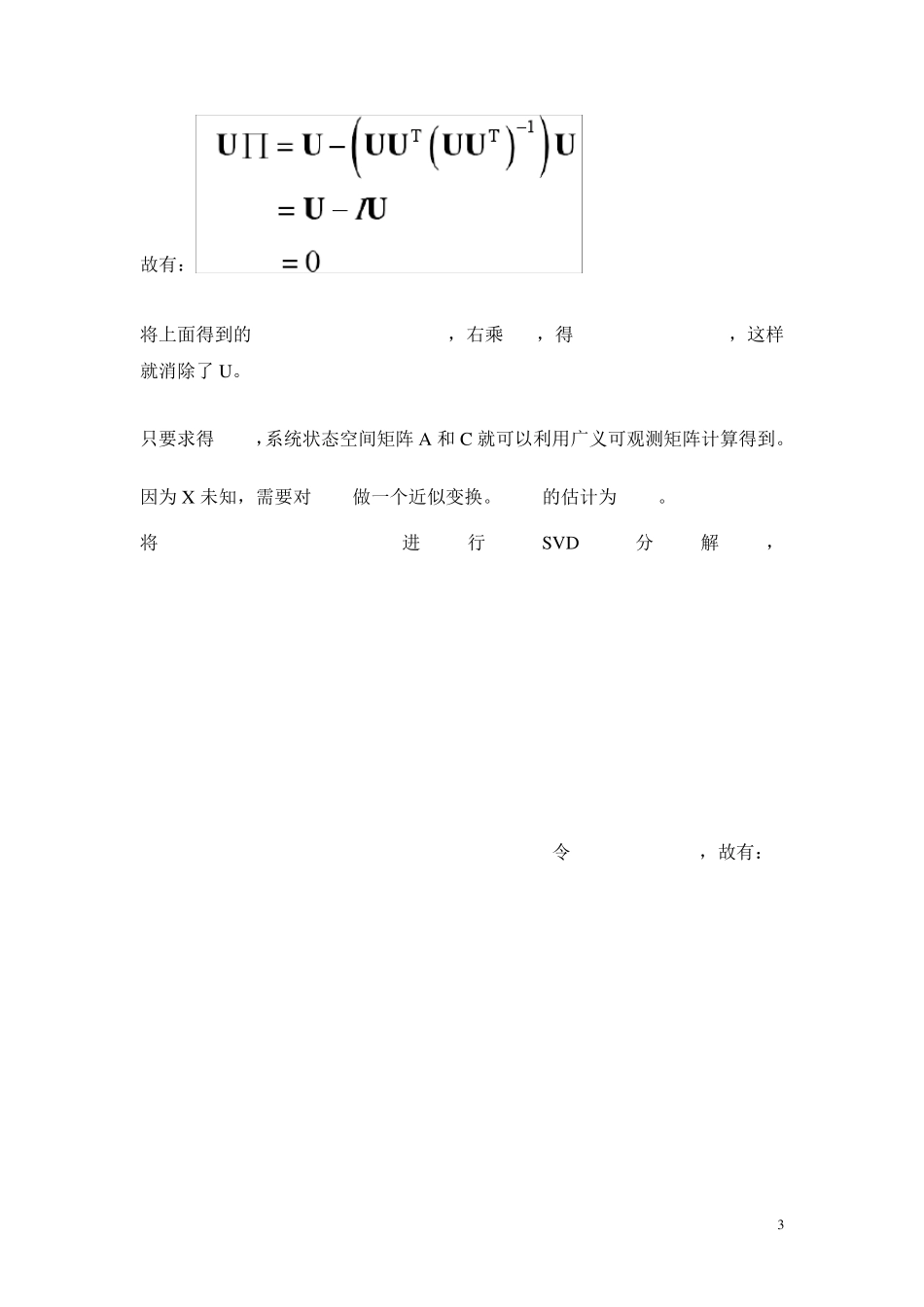
2 推出: 设: 可以得到: 其中 Y 是可知的,需要消除 U ,最简单的方法是子空间正交投影法,数学表达式是: 3 故有: 将上面得到的,右乘,得,这样就消除了U
只要求得,系统状态空间矩阵 A 和 C 就可以利用广义可观测矩阵计算得到
因为 X 未知,需要对做一个近似变换
将进行SV D分解,令,故有: 4 这样就可以得到系统矩阵A 和C
下面确定系统矩阵B和D以及初始状态x(0)
将输出方程写成以下形式:, 此时假设为两输入两输出系统: 因 此 y ( 0 ) 的 B , D , x ( 0 ) 部 分 可以由 下 式 表 示 : 5 将式用比例矩阵表示,为: 6