异步电机控制系统PI 参数计算 对于一个控制系统,在设计PI 调节器的参数时,应该先根据系统的传递函数计算出PI 参数的数量级,然后根据系统的响应性能进一步优化PI 参数值
下面以异步电机控制系统电流环PI 参数推导为例,讲解异步电机控制器PI 参数的设计方法
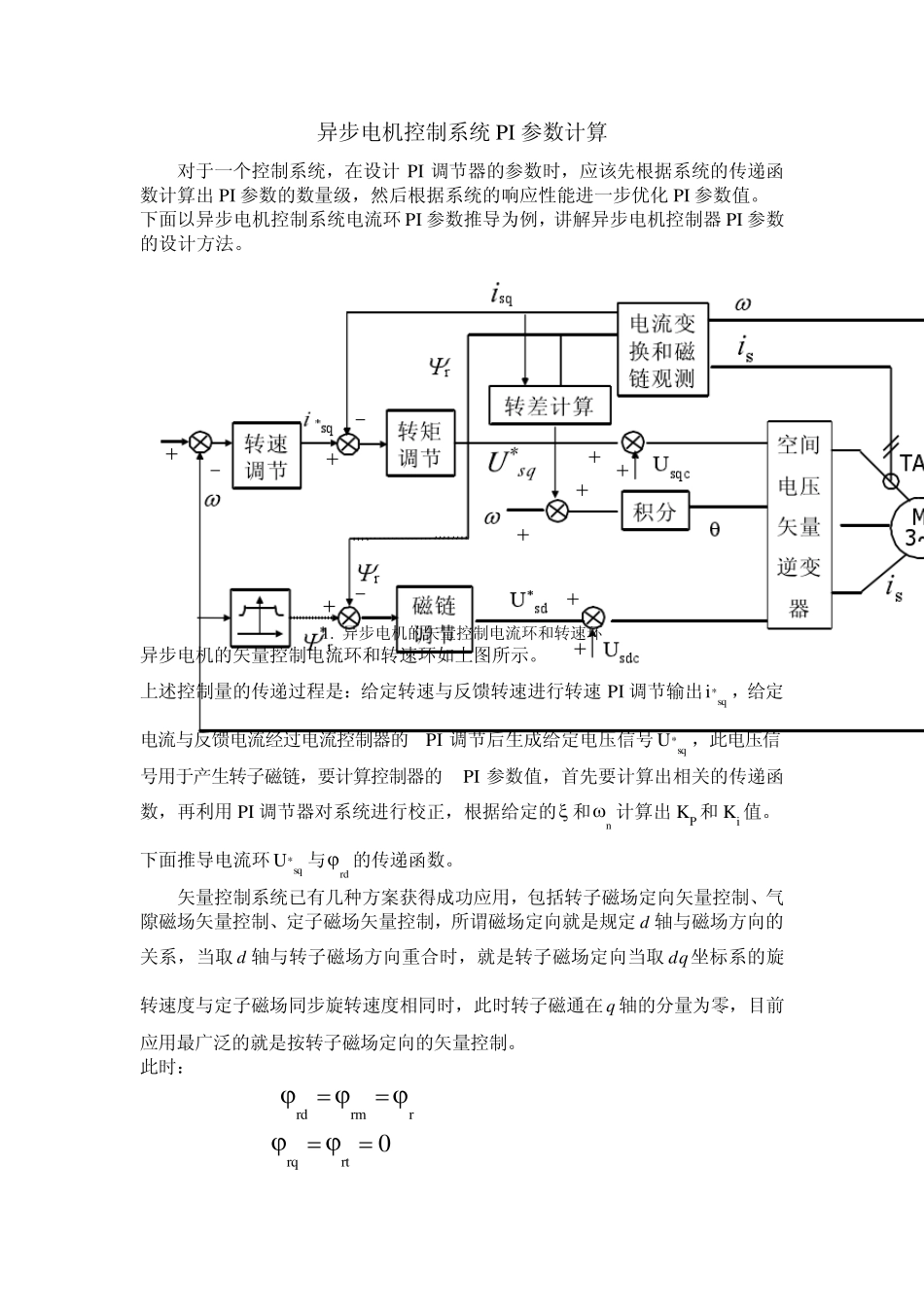
异步电机的矢量控制电流环和转速环 异步电机的矢量控制电流环和转速环如上图所示
上述控制量的传递过程是:给定转速与反馈转速进行转速PI 调节输出sq*i,给定电流与反馈电流经过电流控制器的PI 调节后生成给定电压信号sq*U,此电压信号用于产生转子磁链,要计算控制器的PI 参数值,首先要计算出相关的传递函数,再利用PI 调节器对系统进行校正,根据给定的 和n 计算出KP 和Ki 值
下面推导电流环sq*U与rd 的传递函数
矢量控制系统已有几种方案获得成功应用,包括转子磁场定向矢量控制、气隙磁场矢量控制、定子磁场矢量控制,所谓磁场定向就是规定d 轴与磁场方向的关系,当取 d 轴与转子磁场方向重合时,就是转子磁场定向当取 dq坐标系的旋转速度与定子磁场同步旋转速度相同时,此时转子磁通在q 轴的分量为零,目前应用最广泛的就是按转子磁场定向的矢量控制
此时: rrmrd 2
38 0rtrq 2
39 1s 2
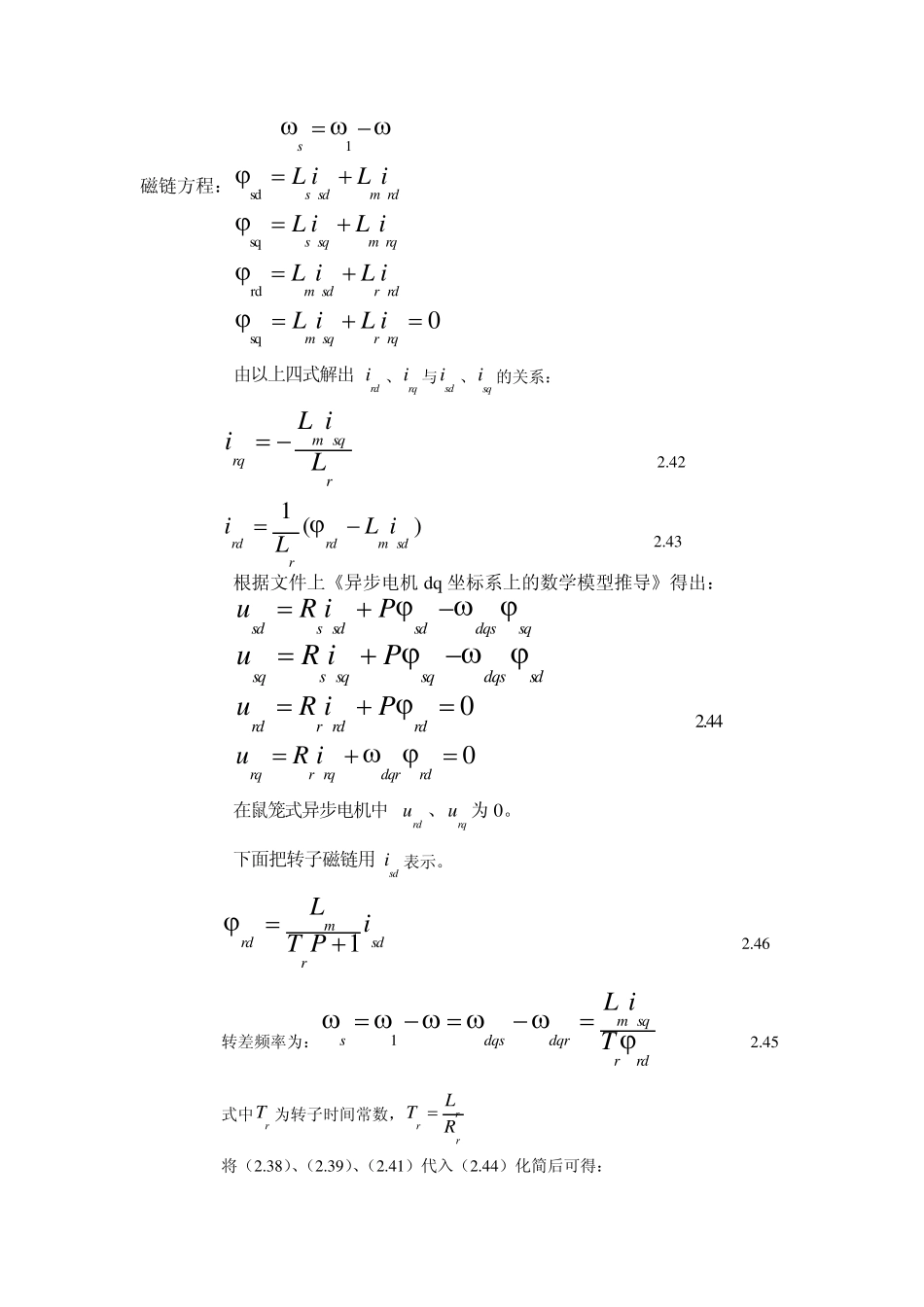
40 磁链方程:rdmsdsiLiLsd rqmsqsiLiLsq 2
41 rdrsdmiLiLrd 0sqrqrsqmiLiL 由以上四式解出rdi、rqi 与sdi、sqi 的关系: rsqmrqLiLi 2
42 )(1sdmrdrrdiLLi 2
43 根据文件上《异步电机 dq 坐标系上的数学模型推导》得出: sqdqssdsdssdPiRu sddqssqsqssqPiRu 0rdrdr