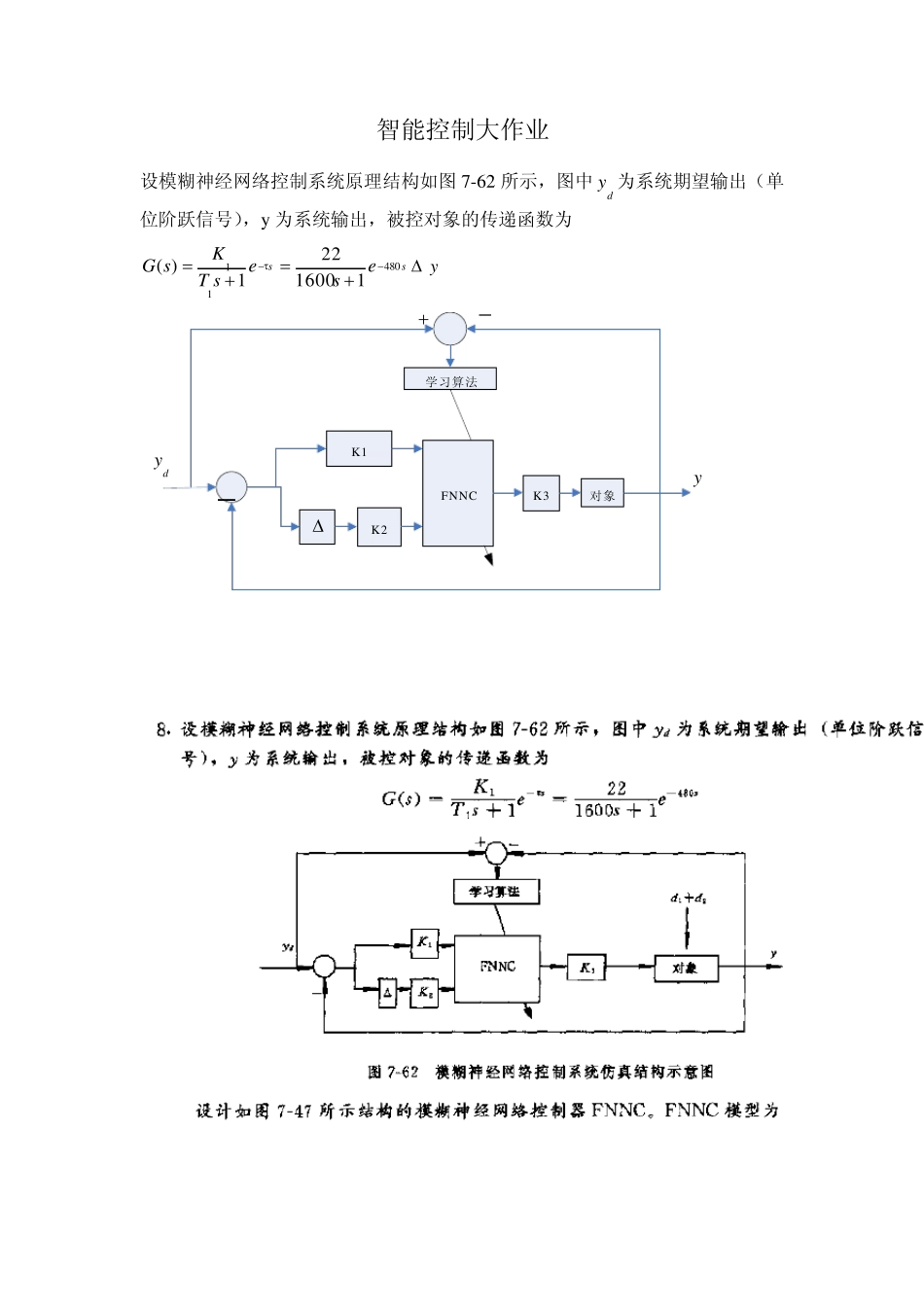
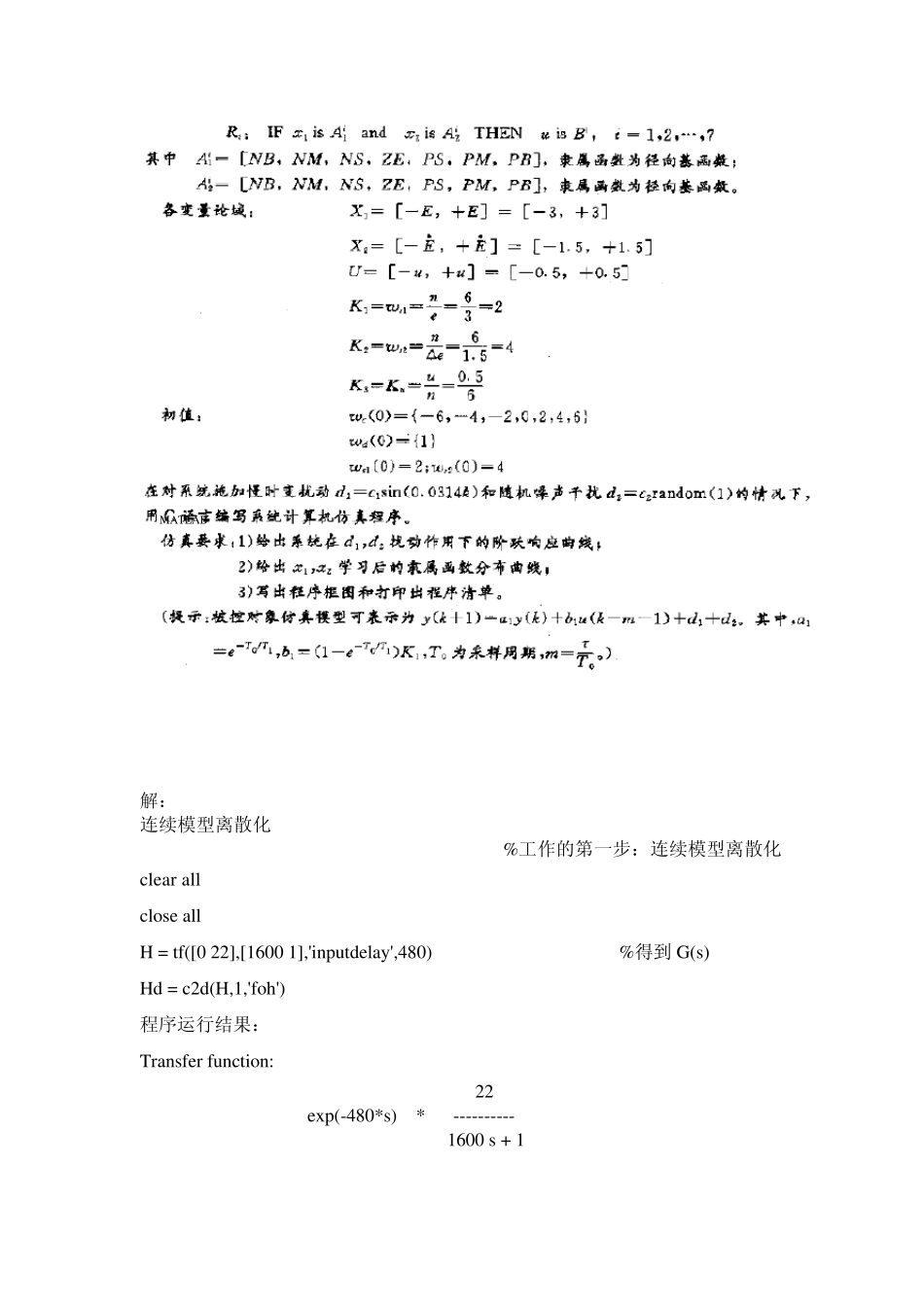
智能控制大作业 设模糊神经网络控制系统原理结构如图 7-62 所示,图中dy 为系统期望输出(单位阶跃信号),y为系统输出,被控对象的传递函数为 ssesesTKsG4801111600221)( y K2K3对象K1学习算法FNNC__dyy 解: 连续模型离散化 %工作的第一步:连续模型离散化 clear all close all H = tf([0 22],[1600 1],'inpu tdelay ',480) %得到 G(s) Hd = c2d(H,1,'foh') 程序运行结果: Transfer fu nction: 22 ex p(-480*s) * ---------- 1600 s + 1 MATLAB Transfer function: 0
006874 z + 0
006872 %将G(s)离散化 z^(-480) * --------------------- z - 0
9994 Sampling time: 1 因为: T0=1,T1=1600, =480,K1=22, 由计算可得: m=480,a1=0
9994,b1=0
006872 所以被控对象仿真模型可表示为: y(k+1)=0
9994y(k)+0
006872u(k-480-1)+d1+d2 令 d1=0
5sin(0
0314k),d2=0
5random(1)
一、模糊神经网络理论 径向基函数(Radial Basis Function,RBF)神经网络是由J
Moody 和 C
Darken于 20 世纪 80 年代末提出的一种神经网络,它是具有单隐层的 3 层前馈网络
RBF 中的作用函数是高斯基函数,其值在输入空间中有限范围内为非零值,因而 RBF 网络是局部逼近的网络
1)RBF 网络的逼近 在 R