第一章 绪论 §1
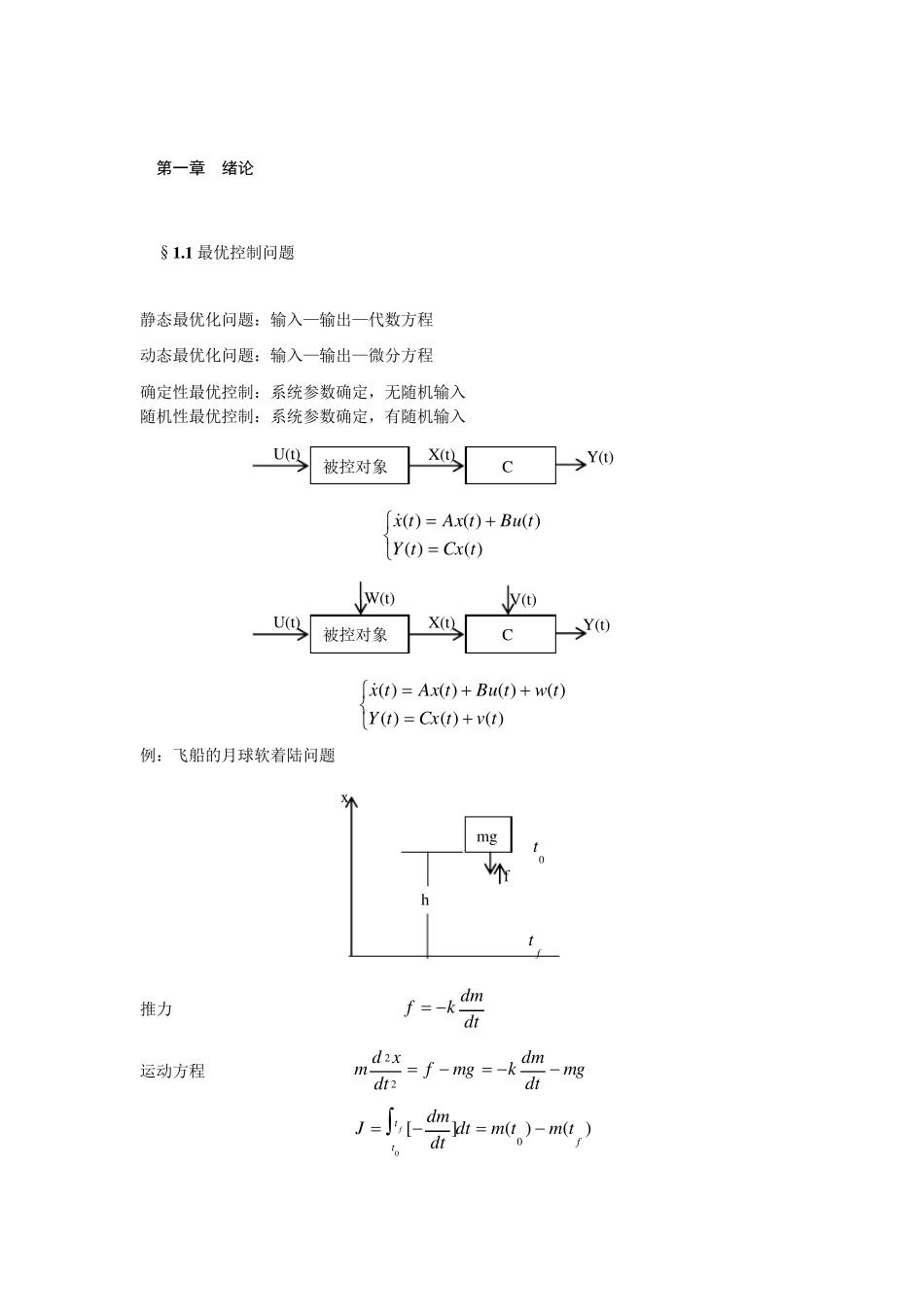
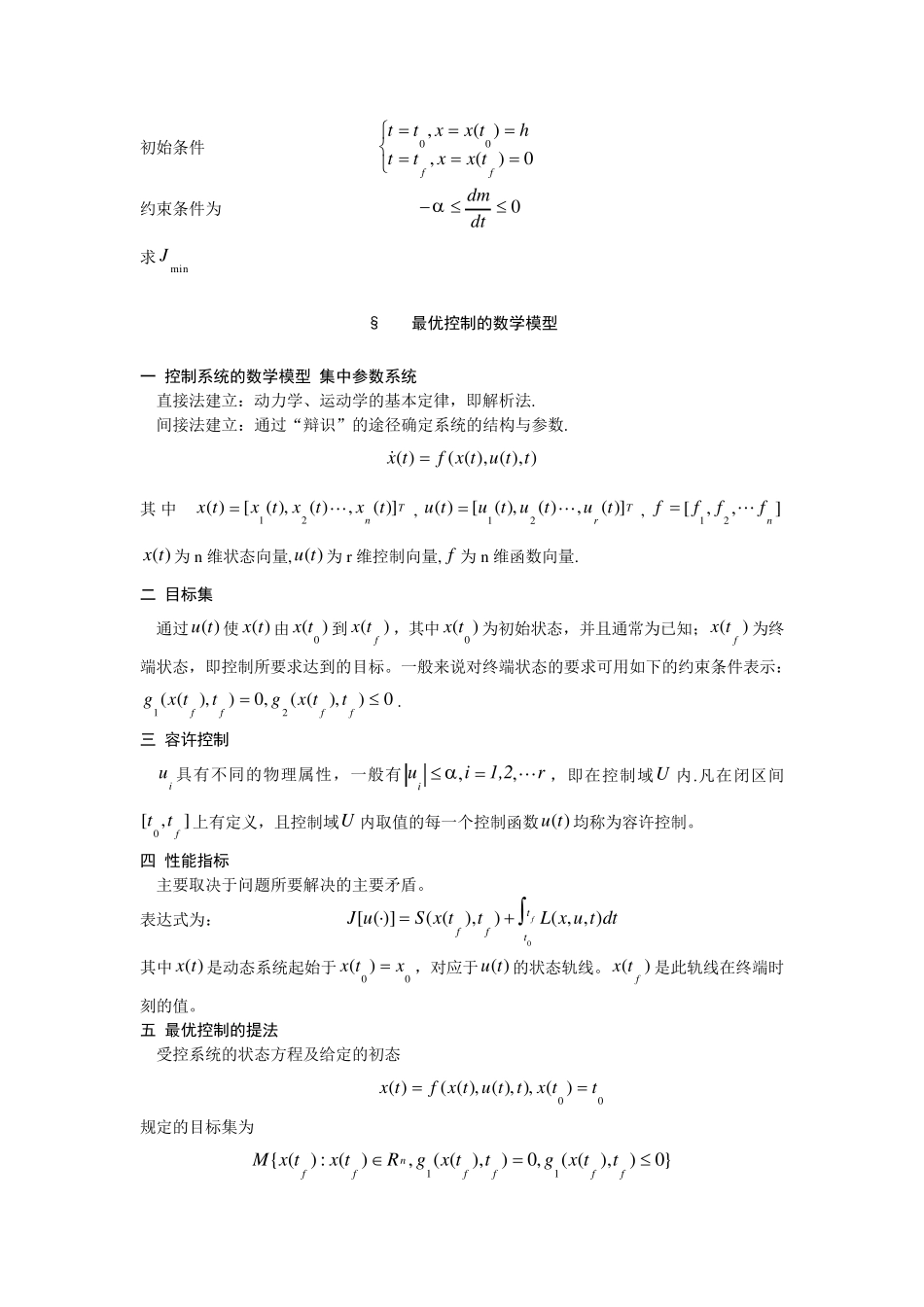
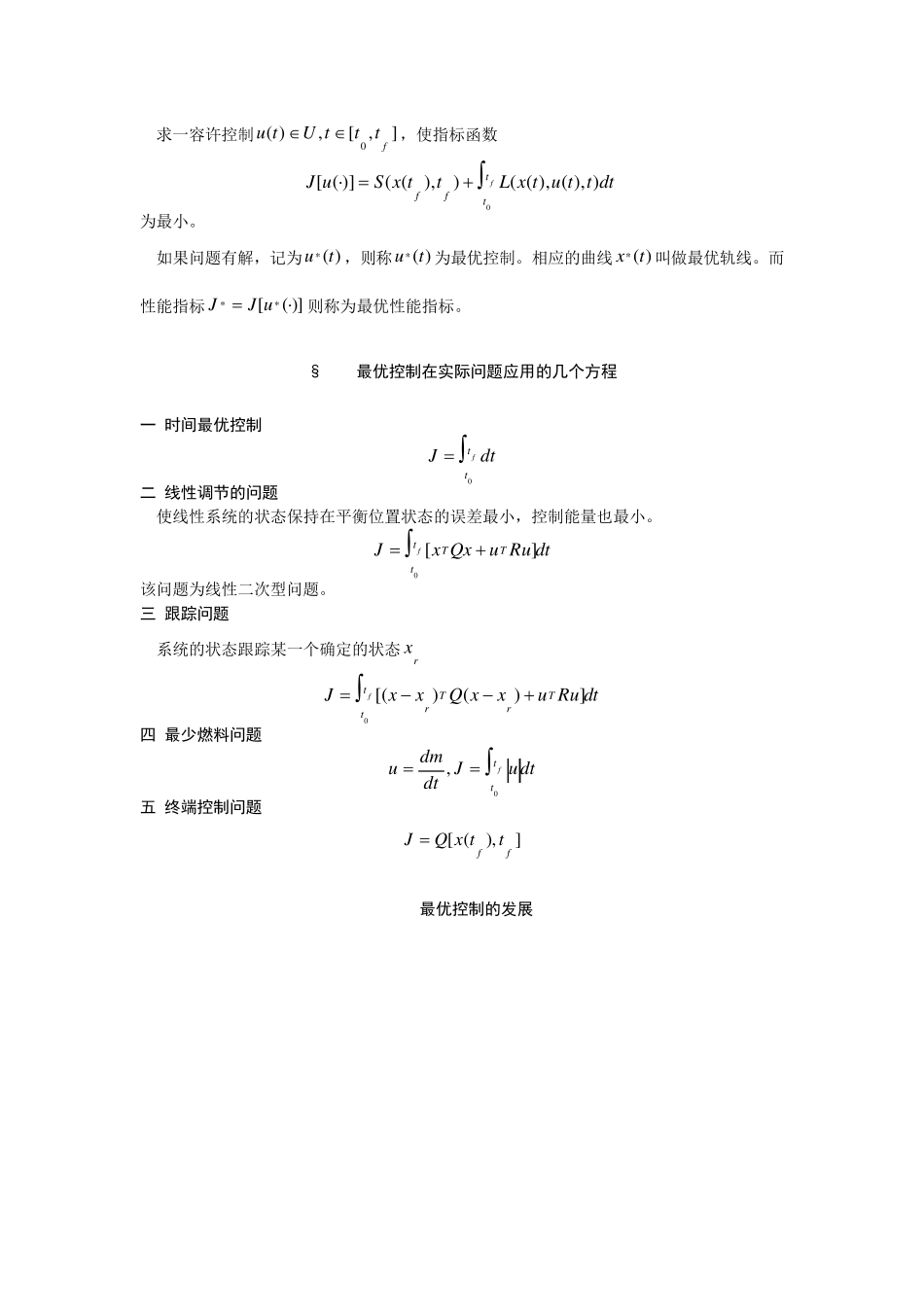
1 最优控制问题 静态最优化问题:输入—输出—代数方程 动态最优化问题:输入—输出—微分方程 确定性最优控制:系统参数确定,无随机输入 随机性最优控制:系统参数确定,有随机输入 )()()()()(tCxtYtButAxtx )()()()()()()(tvtCxtYtwtButAxtx 例:飞船的月球软着陆问题 推力 dtdmkf 运动方程 mgdtdmkmgfdtxdm22 )()(][00ftttmtmdtdtdmJf 被控对象 C U(t) X(t) Y(t) W(t) V(t) 被控对象 C U(t) X(t) Y(t) mg h x 0t ft f 初始条件 0)(,)(,00fftxxtthtxxtt 约束条件为 0dtdm 求minJ §1
2最优控制的数学模型 一 控制系统的数学模型(集中参数系统) 直接法建立:动力学、运动学的基本定律,即解析法
间接法建立:通过“辩识”的途径确定系统的结构与参数
)),(),(()(ttutxftx 其 中 Tn txtxtxtx)](,)(),([)(21,Tr tutututu)](,)(),([)(21,],,[21nffff )(tx为n 维状态向量,)(tu为r 维控制向量, f 为n 维函数向量
二 目标集 通过)(tu使)(tx由)(0tx到)(ftx,其中)(0tx为初始状态,并且通常为已知;)(ftx为终端状态,即控制所要求达到的目标
一般来说对终端状态的要求可用如下的约束条件表示:0)),((,0)),((21ffffttxgttxg
三 容许控制 iu 具有不同的物理属性,一般有r1,2iui,, ,即在控制域U 内
凡在闭区间],[0ftt上有定义,且控制