现代控制理论第五章习题答案 5-1 已知系统状态方程为: 11 1001101011xxu 试设计一状态反馈阵使闭环系统极点配置为-1,-2,-3
解:依题意有: 11 10011 ,01011Ab 2011012112MbAbA b 3r a n k M,系统能控
系统0( , ,)A b C的特征多项式为: 332(1)(1) 1321IA 则将系统写成能控标准 I 型,则有010000101231xxu
引入状态反馈后,系统的状态方程为:()xAbK xbu,其中3K为1矩阵,设012Kkkk,则系统( ,, )KA bK C的特征多项式为: 32210( )det[()]( 3)(2)(1)fIAbKkkk 根据给定的极点值,得到期望特征多项式为: *32( )(1)(2)(3)6116f 比较*( )( )ff与各对应项系数,可解得:012599kkk ,则有:-5-9-9K
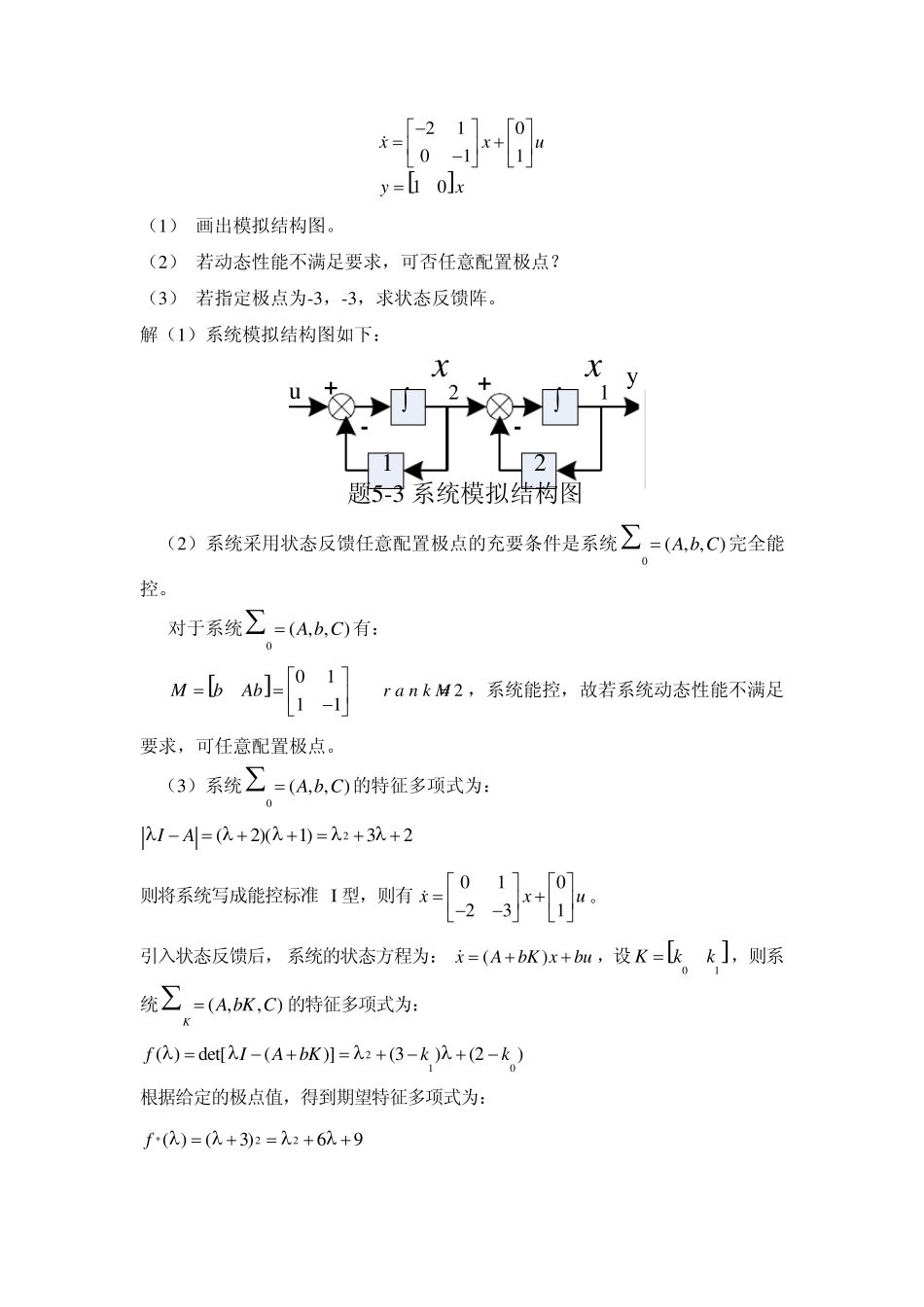
5-3 有系统: 21001110xxuyx (1) 画出模拟结构图
(2) 若动态性能不满足要求,可否任意配置极点
(3) 若指定极点为-3,-3,求状态反馈阵
解(1)系统模拟结构图如下: 12+-+-yu1x2x题5-3 系统模拟结构图 (2)系统采用状态反馈任意配置极点的充要条件是系统0( , ,)A b C完全能控
对于系统0( , ,)A b C有: