9 第二章 控制系统的数学模型 2-1 在图1-22 的液位自动控制系统中,设容器横截面积为F ,希望液位为0c
若液体高度变化率与液体流量差12QQ成正比,试列写以液位为输出量的微分方程式
解 本题研究建立液位控制系统的微分方程数学模型
当12QQ时,液位的高度为0c ;当12QQ时,液位的高度c 将发生变化
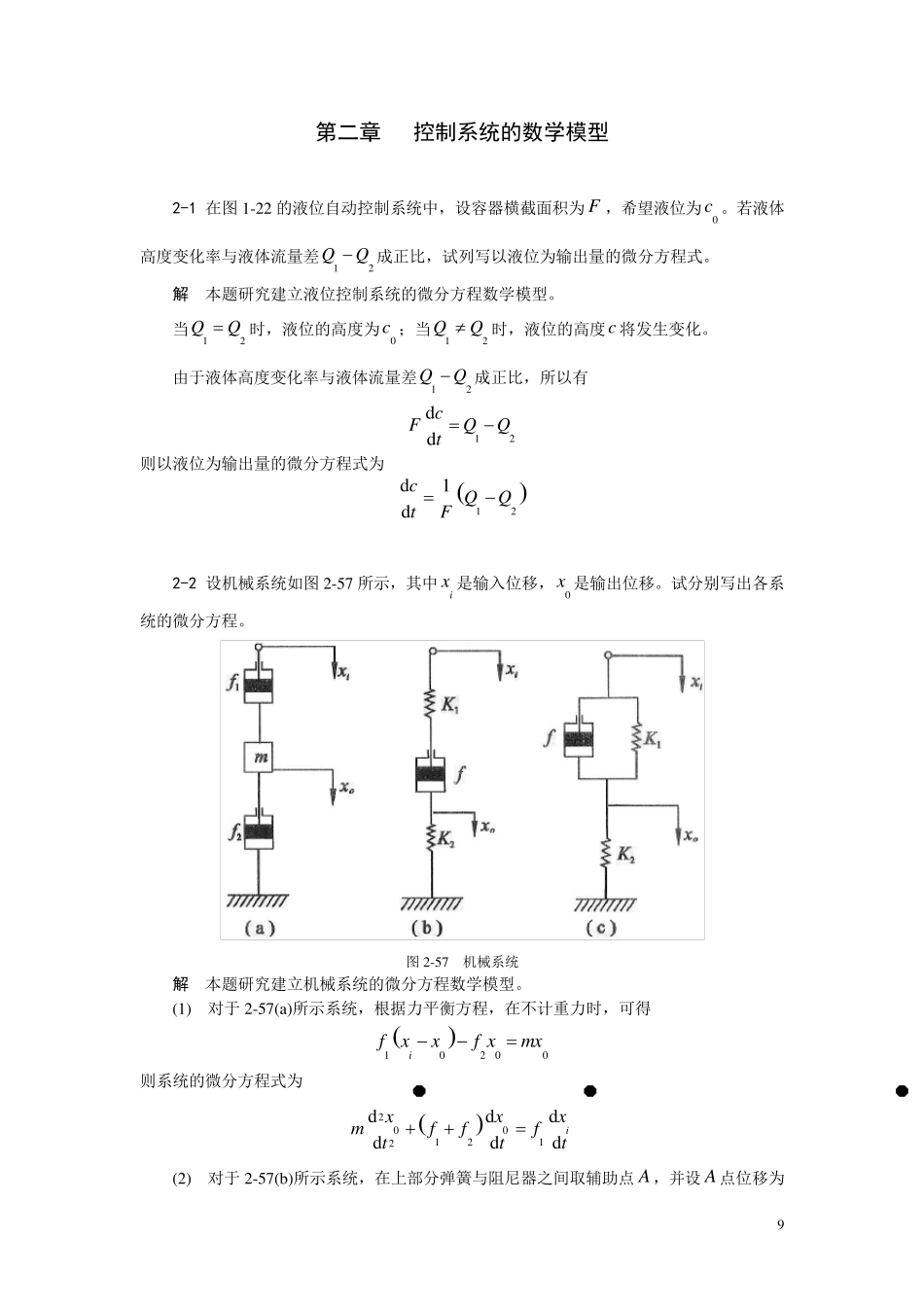
由于液体高度变化率与液体流量差12QQ成正比,所以有 12ddcFQQt 则以液位为输出量的微分方程式为 12d1dcQQtF 2-2 设机械系统如图2-57 所示,其中ix 是输入位移,0x 是输出位移
试分别写出各系统的微分方程
图2-57 机械系统 解 本题研究建立机械系统的微分方程数学模型
(1) 对于 2-57(a)所示系统,根据力平衡方程,在不计重力时,可得 10200ifxxf xmx 则系统的微分方程式为 2001212ddddddixxxmfffttt (2) 对于 2-57(b)所示系统,在上部分弹簧与阻尼器之间取辅助点 A ,并设A 点位移为 10 x ,方向向下
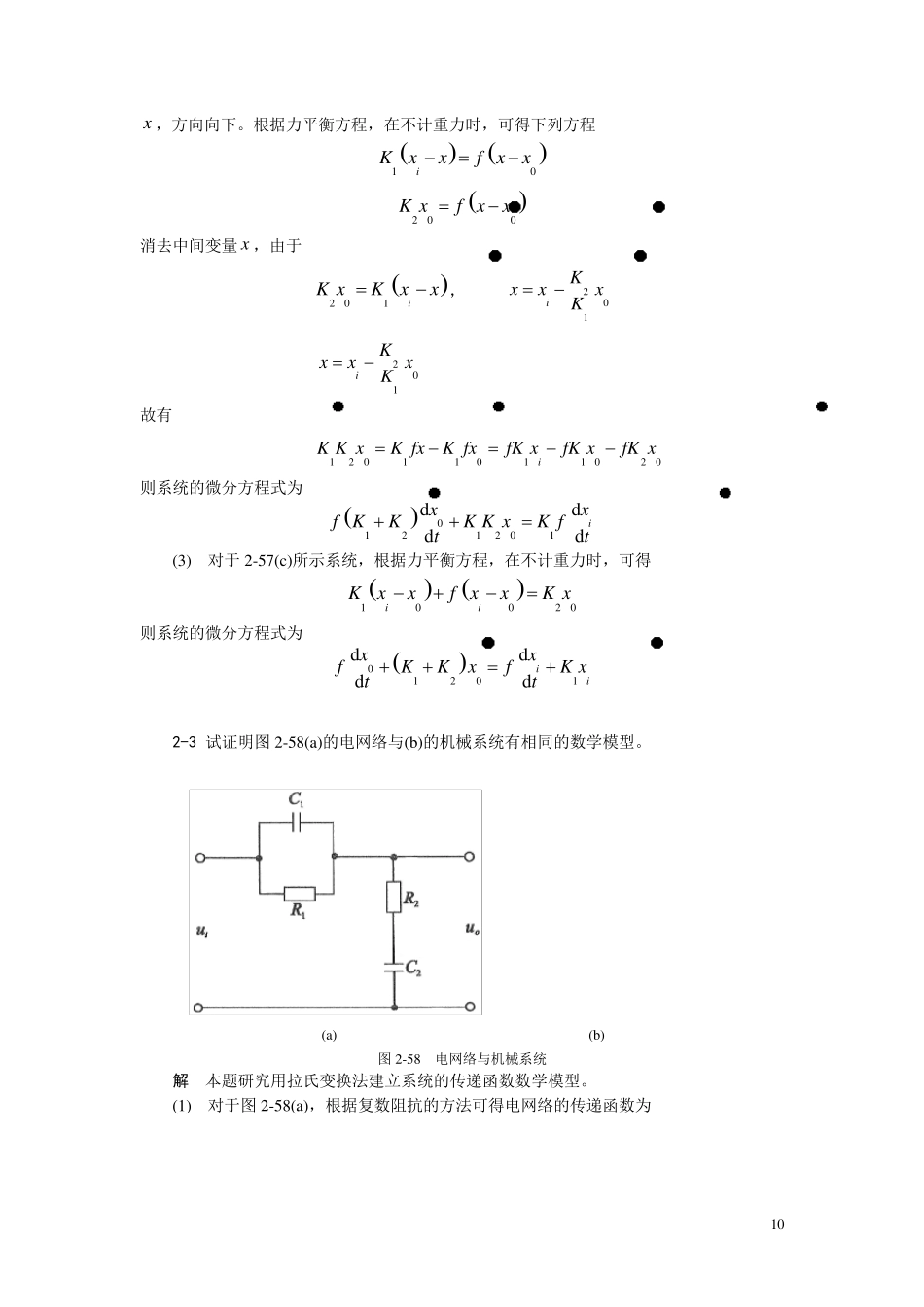
根据力平衡方程,在不计重力时,可得下列方程 10iKxxf xx 200K xf xx 消去中间变量 x ,由于 201iK xKxx, 201iKxxxK 201iKxxxK 故有 12011011020iK K xK fxK fxfK xfK xfK x 则系统的微分方程式为 0121201ddddixxf KKK K xK ftt (3) 对于 2-57(c)所示系统,根据力平衡方程,在不计重力时,可得 10020iiKxxf xxK x 则系统的微分方程式为 01201ddddiixxfKKxfK xtt 2-3 试证明图 2-58(a)