ABB 机器人内部培训 一.手动操纵工业机器人 1
单轴运动控制 (1)左手持机器人示教器,右手点击示教器界面左上角的“”来打开 ABB 菜单栏;点击“手动操纵”,进入手动操纵界面;如图 1-1 所示
图 1-1 进入手动操纵界面 (2)点击“动作模式”,进入模式选择界面
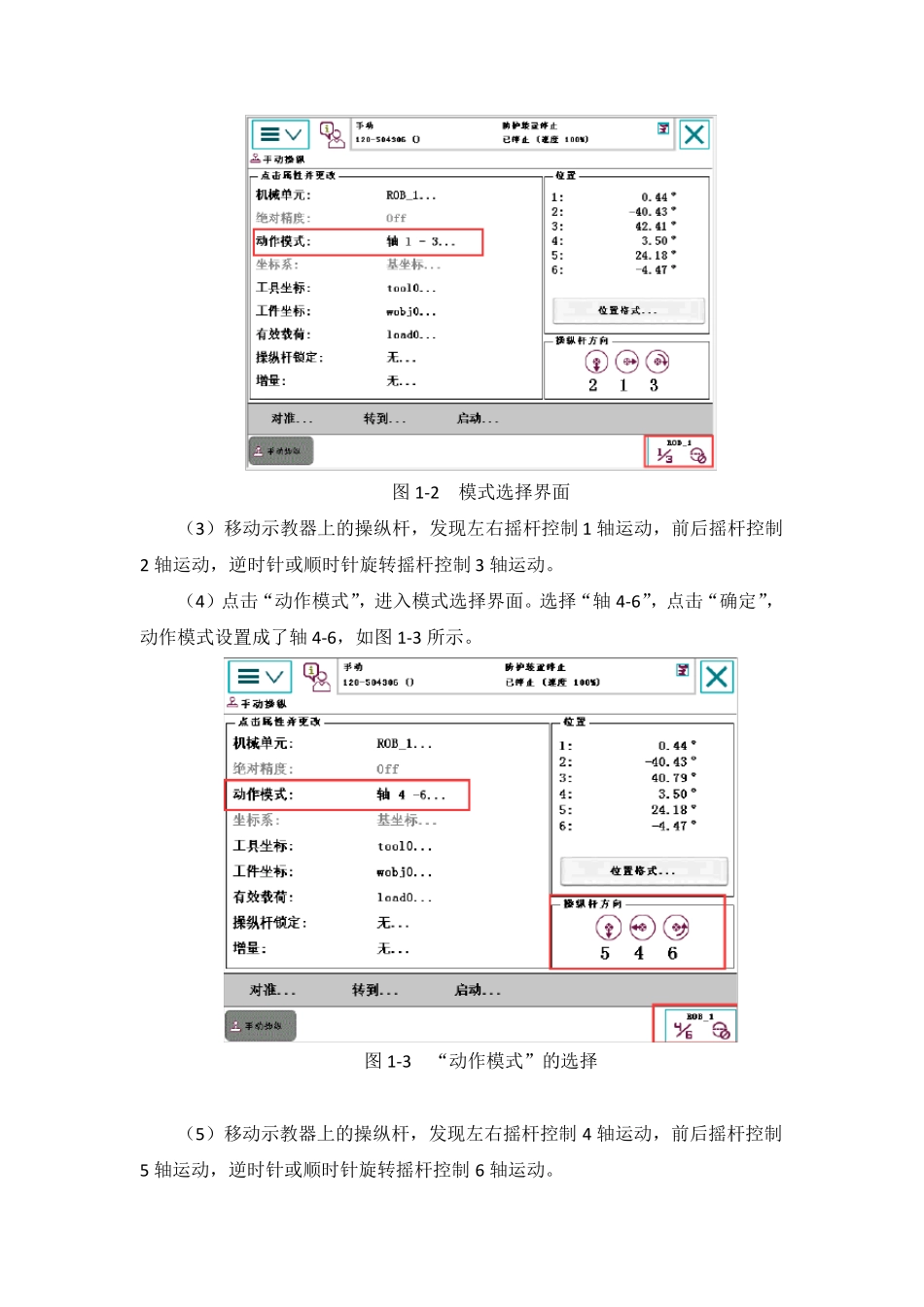
选择“轴1-3”,点击“确定”,动作模式设置成了轴1-3,如图 1-2 所示
图1-2 模式选择界面 (3)移动示教器上的操纵杆,发现左右摇杆控制1 轴运动,前后摇杆控制2 轴运动,逆时针或顺时针旋转摇杆控制3 轴运动
(4)点击“动作模式”,进入模式选择界面
选择“轴4-6”,点击“确定”,动作模式设置成了轴4-6,如图1-3 所示
图1-3 “动作模式”的选择 (5)移动示教器上的操纵杆,发现左右摇杆控制4 轴运动,前后摇杆控制5 轴运动,逆时针或顺时针旋转摇杆控制6 轴运动
【提示】轴切换技巧:示教器上的 按键能够完成“轴1-3”和“轴4-6”轴组的切换
线性运动与重定位运动控制 (1)点击“动作模式”,进入模式选择界面
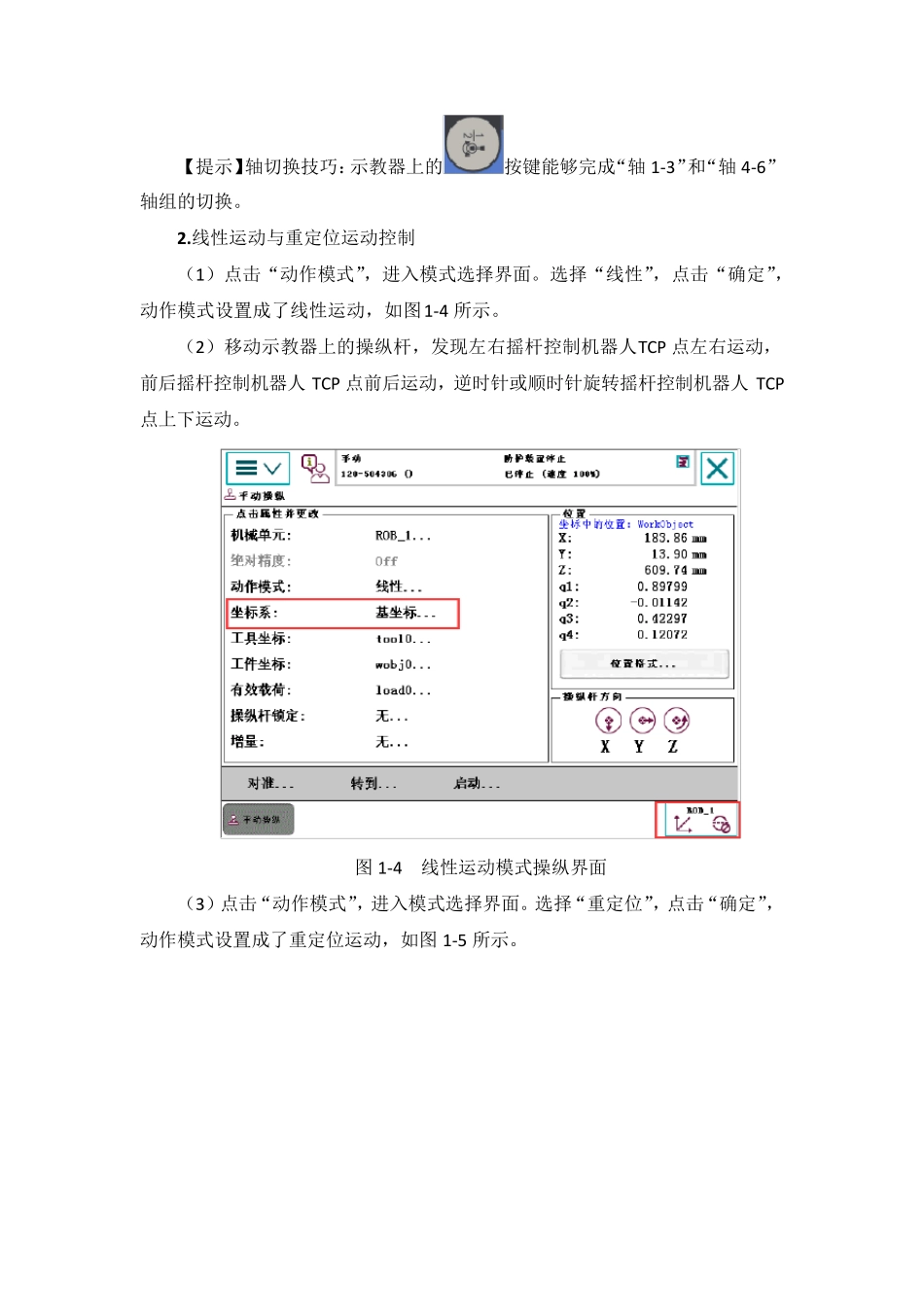
选择“线性”,点击“确定”,动作模式设置成了线性运动,如图1-4 所示
(2)移动示教器上的操纵杆,发现左右摇杆控制机器人TCP 点左右运动,前后摇杆控制机器人 TCP 点前后运动,逆时针或顺时针旋转摇杆控制机器人 TCP点上下运动
图 1-4 线性运动模式操纵界面 (3)点击“动作模式”,进入模式选择界面
选择“重定位”,点击“确定”,动作模式设置成了重定位运动,如图 1-5 所示
图1-5 “重定位”动作模式的选择 (4)移动示教器上的操纵杆,发现机器人围绕着 TCP 运动
工具坐标系建立 工业机器人是通过末端安装不同的工具完成各种作业任务
要想让机器人正常作业,就要让机器人末端工具能够精确地达到某一确定位姿,并能够始终保持这一状态