ABB 机 器 人 的 组 成 IRB 型 机 器 人 是 著 名 的 瑞 典 机 器 人 生 厂 商 ABB 公 司 的 产 品 ,IRB 指 ABB标 准 系 列 机 器 人
IRB 机 器 人 常 用 于 焊 接 、 涂 刷 、 搬 运 与 切 割
常 用 的 型 号有 : IRB 1400, IRB 2400, IRB 4400, IRB 6400
其 型 号 的 解 释 如 下 : IRB 指 的 是 ABB 机 器 人
第 一 位 数 ( 1,2,4,6) 指 机 器 人 的 大 小
第 二 位 数 ( 4) 指 的 是 属 于 S4 或 S4C 系 统
无 论 是 何 种 型 号 , 机 器 人 控 制 部 分 基 本 相 同
IR 1400: 承 载 较 小 , 最 大 承 载 为5kg, 常 用 于 焊 接
IRB 2400: 承 载 较 小 , 最 大 承 载 为 7kg , 常 用 于 焊 接
IRB 4400: 承 载 较 大 , 最 大 承 载 为60kg 常 用 于 搬 运 或 大 范 围 焊 接
IRB 6400: 承 载 较 大 , 最 大 承 载 为200kg, 常 用 于 搬 运 或 大 范 围 焊 接
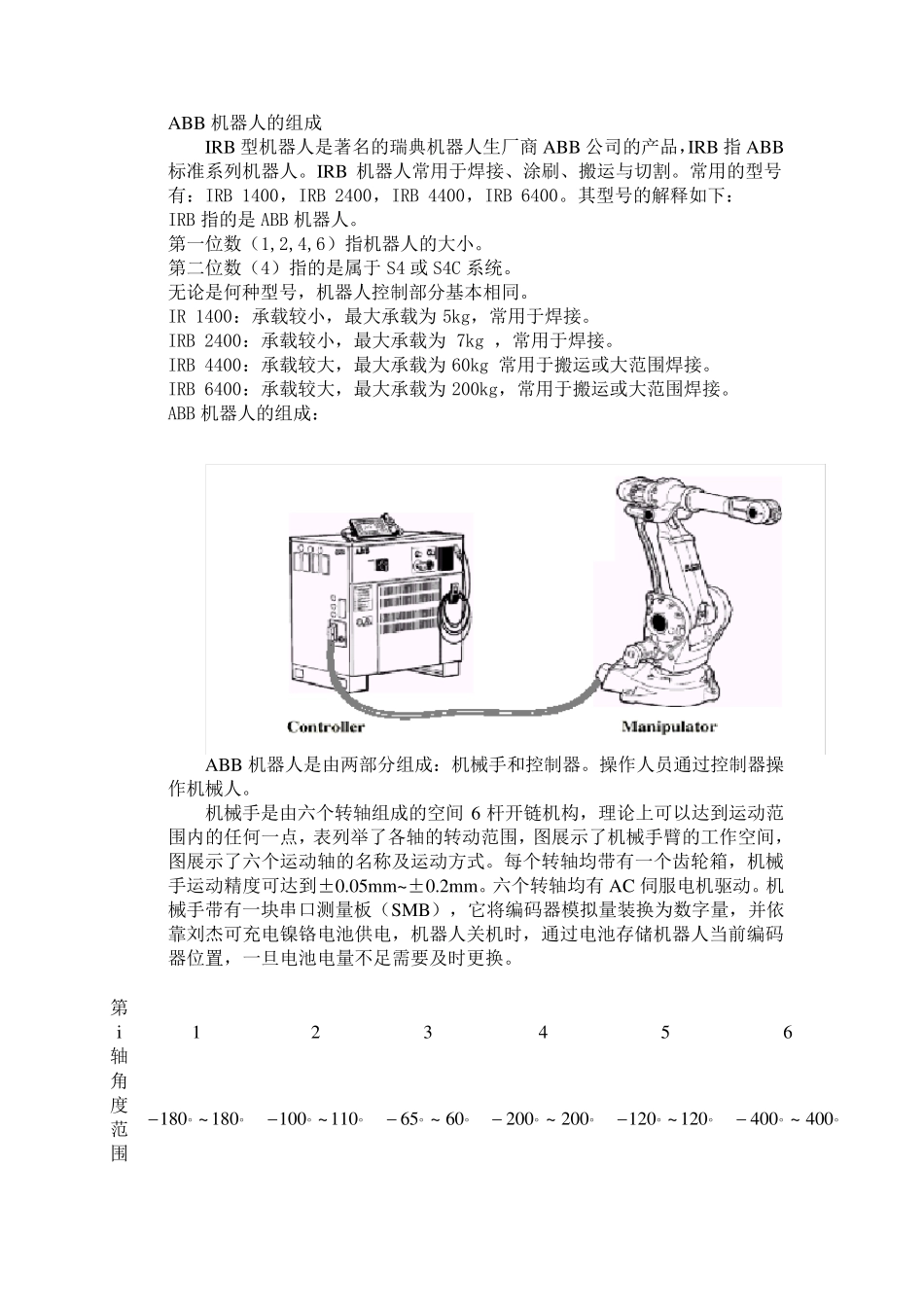
ABB 机 器 人 的 组 成 : ABB 机 器 人 是 由 两 部 分 组 成 : 机 械 手 和 控 制 器
操 作 人 员 通 过 控 制 器 操作 机 械 人
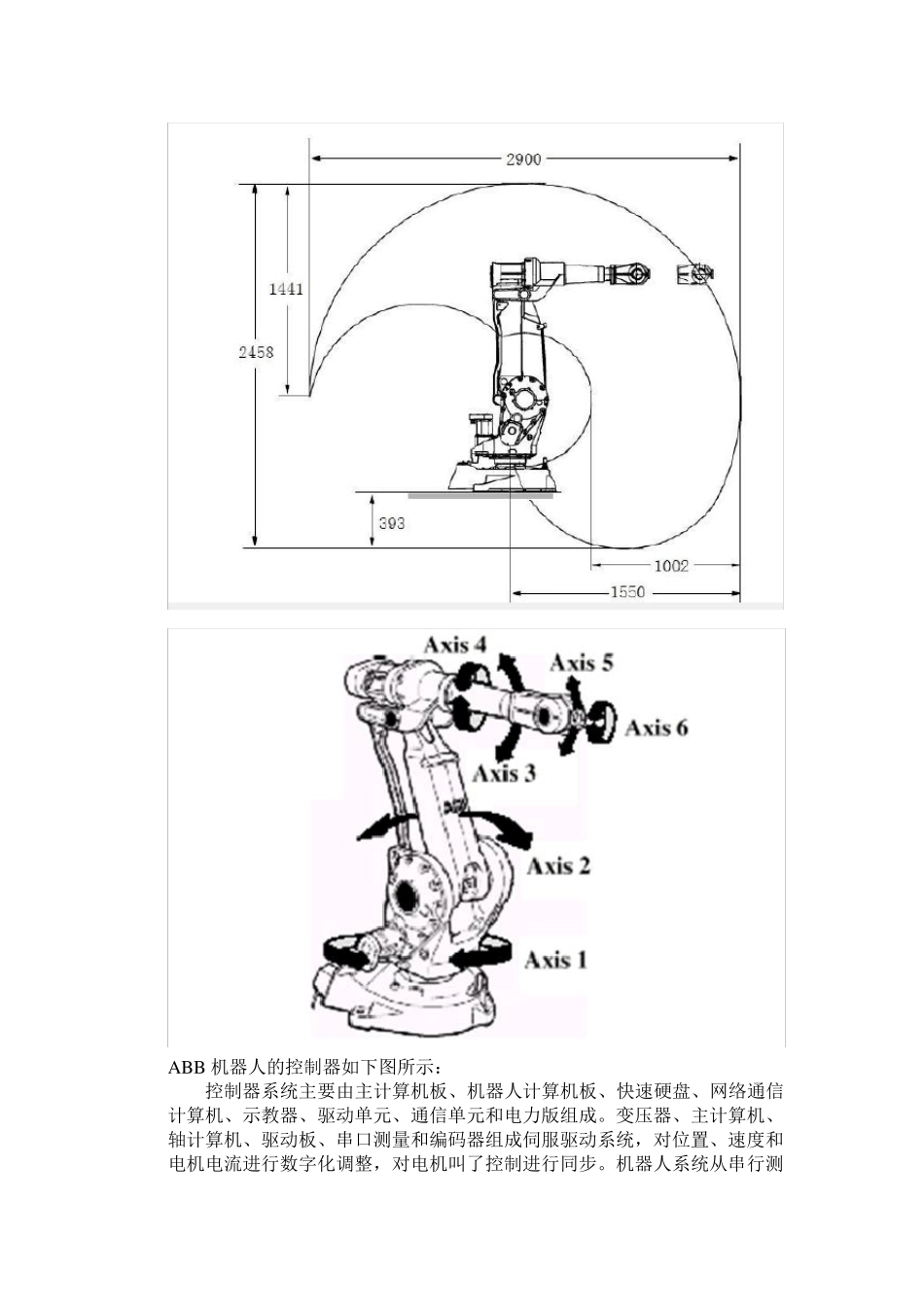
机 械 手 是 由 六 个 转 轴 组 成 的 空 间6 杆 开 链 机 构 , 理 论 上 可 以 达 到 运 动 范围 内 的 任 何 一 点 , 表 列 举 了 各 轴 的 转 动 范 围 , 图 展 示 了 机 械 手 臂 的 工 作 空 间 ,图 展 示 了 六 个 运 动 轴 的 名 称 及 运 动 方 式