基于基于分布式运动控制系统分布式运动控制系统 CANopen 简介 2009 年 7 月 8 日 © Techsoft 深圳市泰科智能伺服技术有限公司 基于基于分布式运动控制分布式运动控制分布式运动控制系统系统 CANopen 简介 徐国平 运动控制运动控制产品产品产品经理经理 深圳市泰科智能伺服技术有限公司 Techsoft motion (Shenzhen) technology Ltd
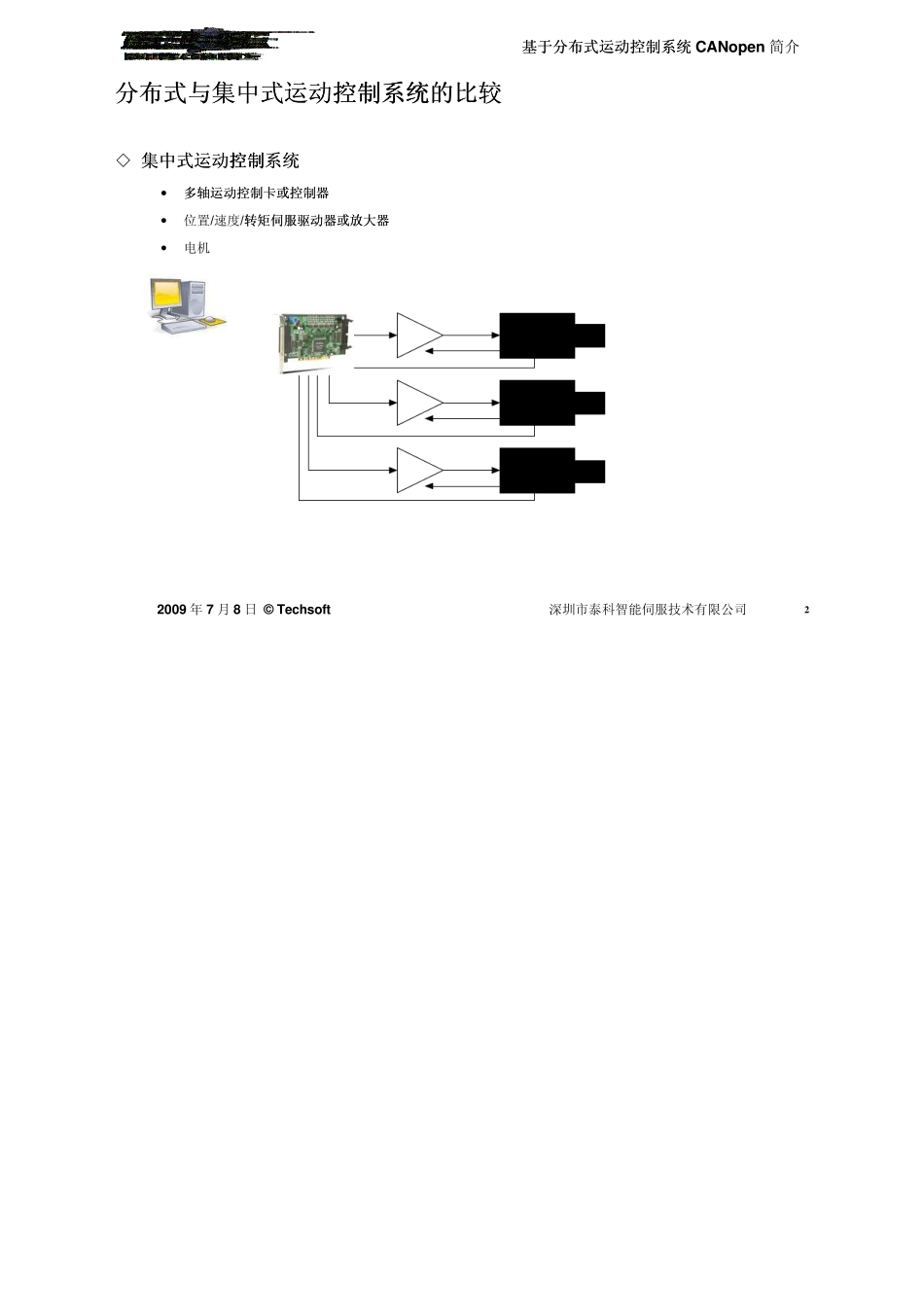
基于基于分布式运动控制系统分布式运动控制系统CANopen 简介 2009 年7 月8 日 © Techsoft 深圳市泰科智能伺服技术有限公司 1 概 述 ◇ 分布式控制分布式控制与与集中集中式式运动运动控制控制控制系统系统系统的比较的比较 ◇ CAN物理层 ◇ CANopen协议 ◇ 驱动器驱动器与与运动控制运动控制设备概述设备概述 ◇ 多轴多轴同步同步同步协调运动协调运动 ◇ IDMxxx(CAN/CANopen)系列系列全全数字数字通用通用通用伺服伺服伺服驱动器驱动器 基于基于分布式运动控制系统分布式运动控制系统CANopen 简介 2009 年7 月8 日 © Techsoft 深圳市泰科智能伺服技术有限公司 2 分布式分布式与与集中集中式式运动运动控制控制控制系统系统系统的比较的比较 ◇ 集中集中式式运动运动控制控制控制系统系统 • 多轴运动控制多轴运动控制卡或控制器卡或控制器 • 位置/速度/转矩伺服驱动器转矩伺服驱动器或放大器或放大器 • 电机 基于基于分布式运动控制系统分布式运动控制系统CANopen 简介 2009 年7 月8 日 © Techsoft 深圳市泰科智能伺服技术有限公司 3 集中集中式运动式运动式运动控制控制控制系统组成系统组成系统组成部分部分 ◇ 控制器 • PC运动控制卡 • 独立式独立式运动控制器运动控制器 • +/- 10V命令命令信信号 ◇