第 1 页 共 18 页 FANUC 机器人程序讲解 1 机器人程序 FANUC 机器人程序分为TP、MACRO、CAREL 几种类型
TP 为一般程序,用示教器可以创建、编辑、删除
MARCO 为宏程序,在设备调试完成后一般无需添加和编辑,需要时宏程序也可在示教器上创建、编辑、删除
CAREL 为系统自带程序 ,操作者没有编辑权限
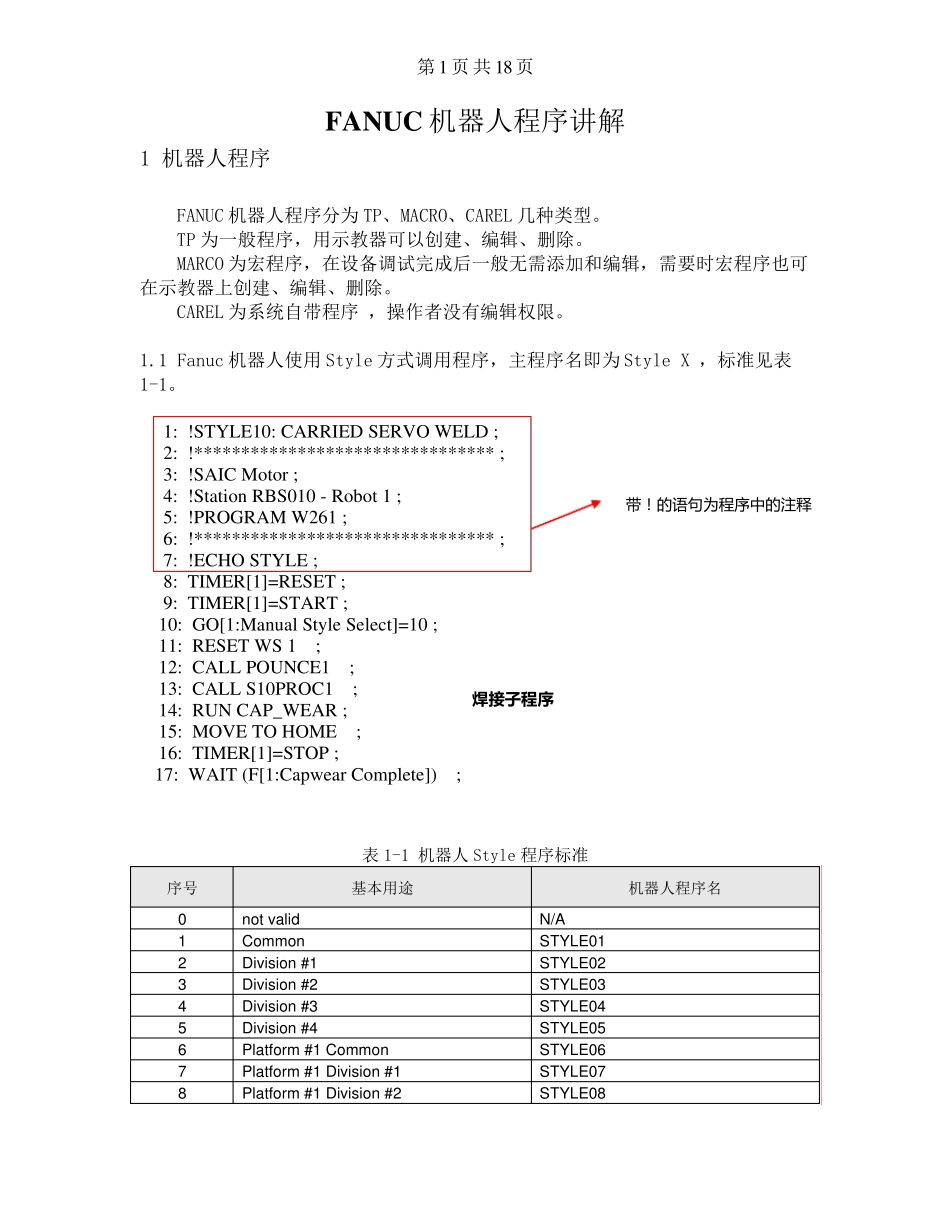
1 Fanuc 机器人使用 Style 方式调用程序,主程序名即为Style X ,标准见表1-1
STYLE10: CARRIED SERVO WELD ; 2:
******************************** ; 3:
SAIC Motor ; 4:
Station RBS010 - Robot 1 ; 5:
PROGRAM W261 ; 6:
******************************** ; 7:
ECHO STYLE ; 8: TIMER[1]=RESET ; 9: TIMER[1]=START ; 10: GO[1:Manual Style Select]=10 ; 11: RESET WS 1 ; 12: CALL POUNCE1 ; 13: CALL S10PROC1 ; 14: RUN CAP_WEAR ; 15: MOVE TO HOME ; 16: TIMER[1]=STOP ; 17: WAIT (F[1:Capwear Complete]) ; 表 1-1 机器人Style 程序标准 序号 基本用途 机器人程序名 0 not v alid N/A 1 Common STYLE01 2 Div ision #1 STYLE02 3 Div ision #2 STYLE03 4 Div ision #3 STYLE04 5 Div ision #4 ST