车用磁阻传感器式电子罗盘系统的开发 HM C1055 系列各向异性磁阻传感器
三维电子罗盘的总体设计
三维电子罗盘系统的硬件设计的介绍
车载罗盘系统的干扰校正
解决方案: 对传感器敏感元件施加一个瞬态的强恢复磁场恢复或保持传感器特性
采用标定的方法消除硬铁影响干扰
三轴设计和姿态补偿使罗盘处于任何姿态时均能正常使用
罗盘是一种重要的导航工具,已广泛应用于飞机和航海导航等领域
一般在飞机和航海导航系统中使用的惯性导航系统由于价格昂贵、结构复杂、导航误差随时间累计等原因而不适合车载使用;传统的罗盘虽然价格便宜,但不能工作于像行驶的汽车这种不稳定的环境中
另外,传统罗盘不能够电子输出,其信号不能集成到汽车的控制系统中,给实现基于精确导航的智能交通带来了不便
本文针对以上问题,充分考虑到汽车内部环境的不平稳性以及汽车发动机等对磁场的干扰,利用磁阻传感器设计了一种车载磁阻式电子罗盘系统
HMC1055 系列各向异性磁阻传感器 HMC1055 系列集成了HMC1051Z 单轴磁阻传感器、HMC1052双轴磁阻传感器和一个二轴MEMSIC MXS3334UL 加速度传感器
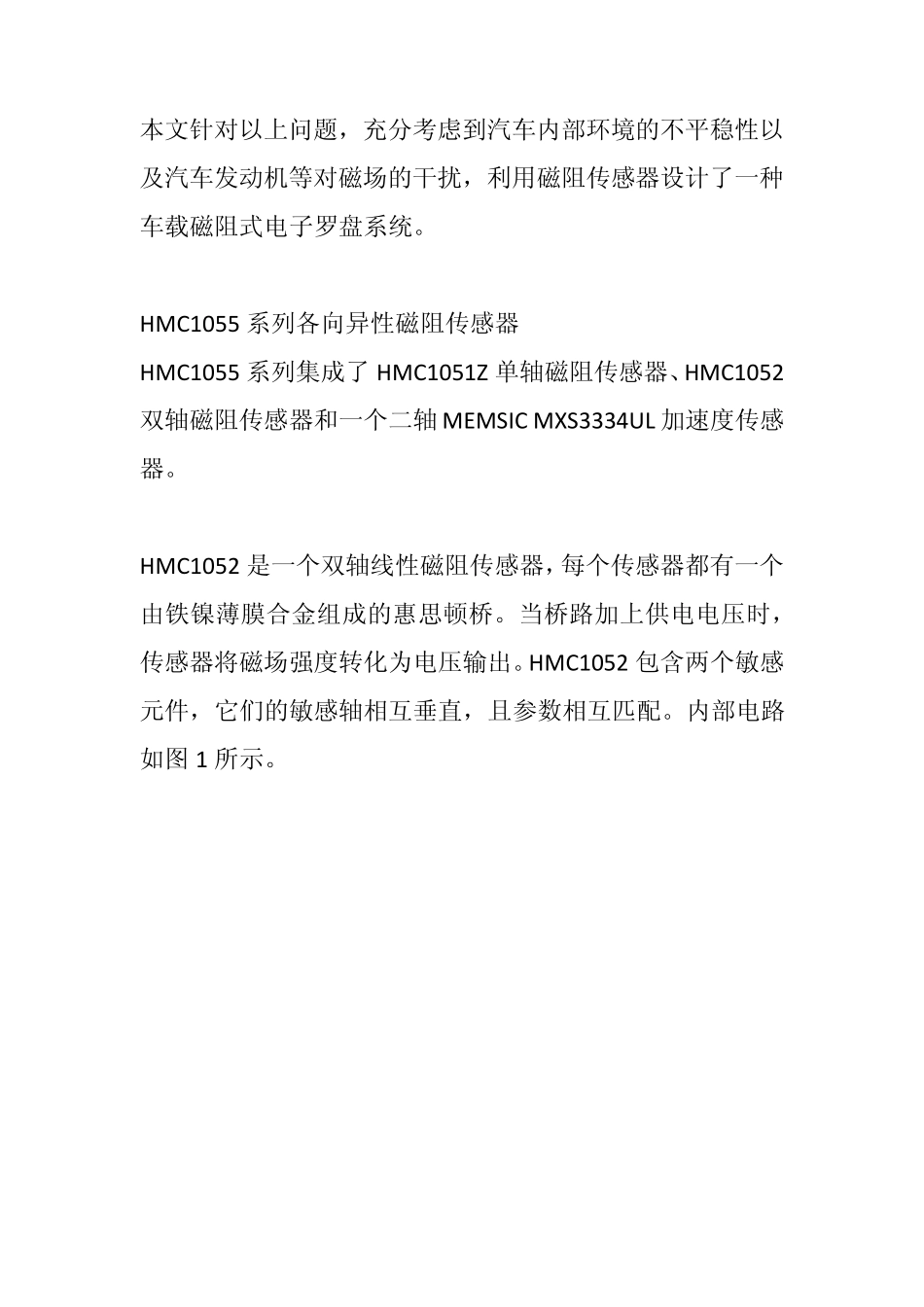
HMC1052 是一个双轴线性磁阻传感器,每个传感器都有一个由铁镍薄膜合金组成的惠思顿桥
当桥路加上供电电压时,传感器将磁场强度转化为电压输出
HMC1052 包含两个敏感元件,它们的敏感轴相互垂直,且参数相互匹配
内部电路如图 1 所示
除了惠思顿电桥,HMC1052 还有两个位于芯片上的磁耦合带:偏置带和置位/复位带
两个敏感元件都有这两个带
置位/复位带用于确保精度;偏置带用于校正传感器或偏置任何不想要的磁场
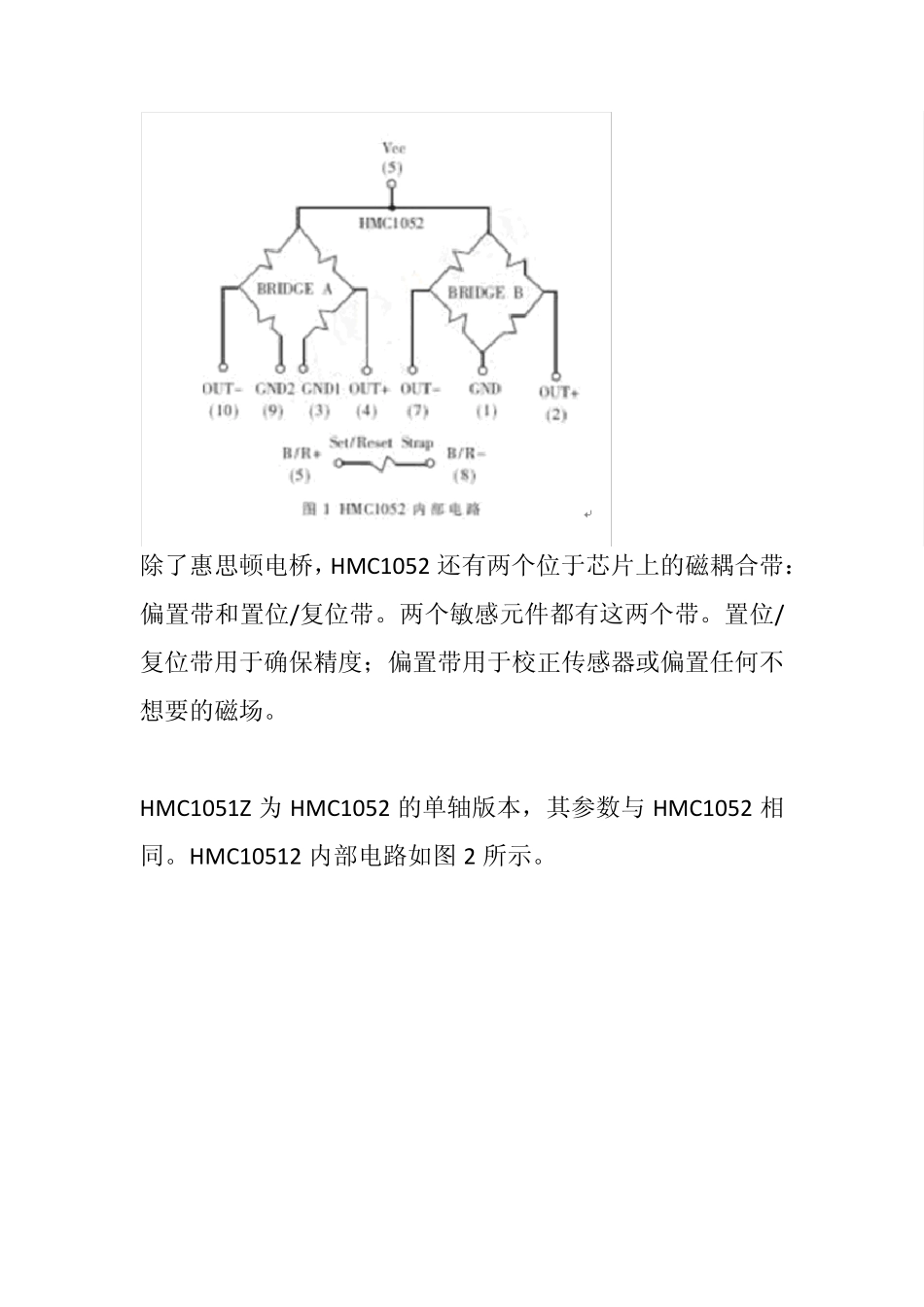
HMC1051Z为 HMC1052 的单轴版本,其参数与 HMC1052 相同
HMC10512 内部电路如图 2 所示
MEMSIC MXS3334UL 是一个二轴的加速