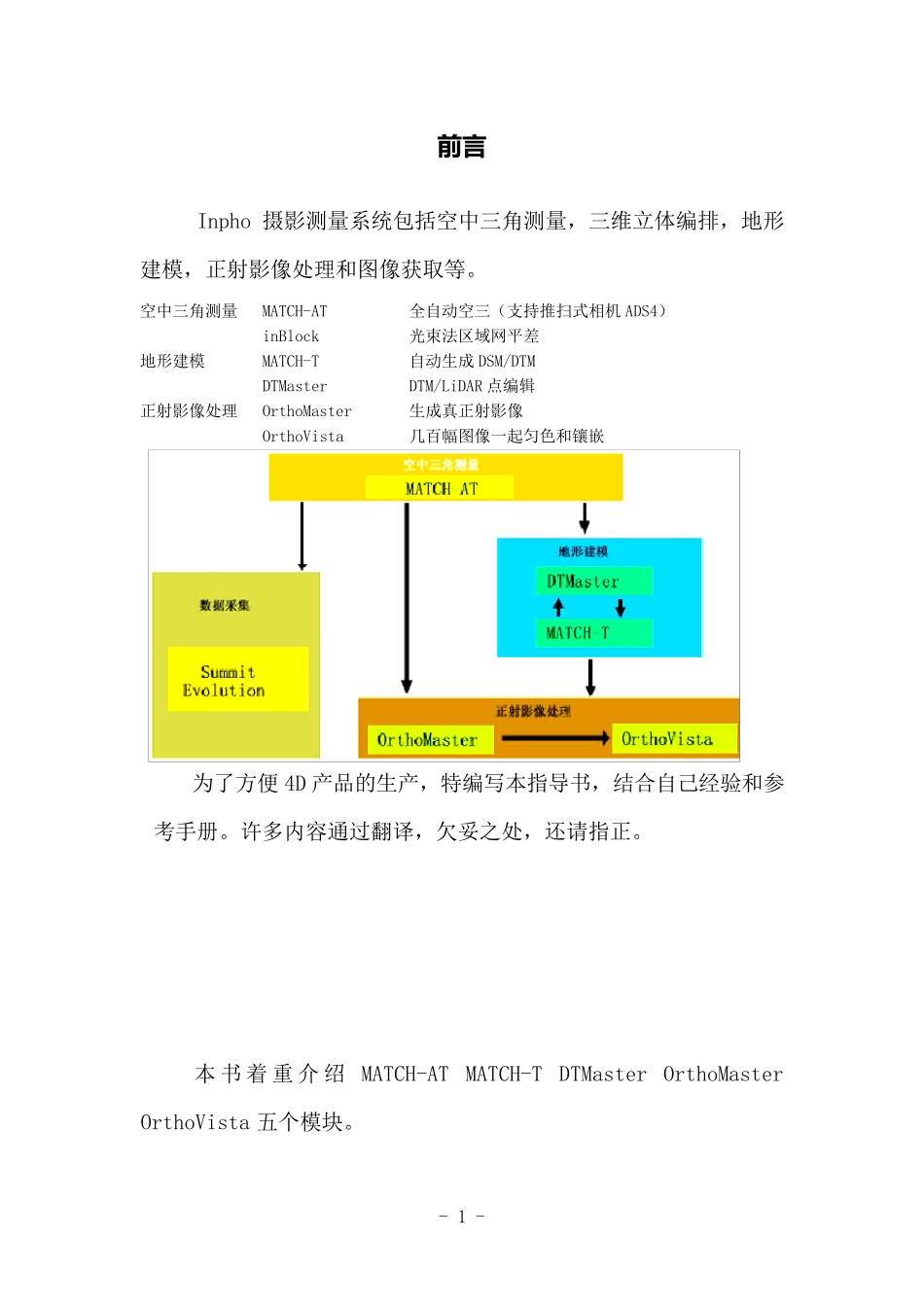
- 1 - 前言 Inpho 摄影测量系统包括空中三角测量,三维立体编排,地形建模,正射影像处理和图像获取等
空中三角测量 MATCH-AT 全自动空三(支持推扫式相机 ADS4) inBlock 光束法区域网平差 地形建模 MATCH-T 自动生成 DSM/DTM DTMaster DTM/LiDAR 点编辑 正射影像处理 OrthoMaster 生成真正射影像 OrthoVista 几百幅图像一起匀色和镶嵌 为了方便 4D 产品的生产,特编写本指导书,结合自己经验和参考手册
许多内容通过翻译,欠妥之处,还请指正
本 书 着 重 介 绍 MATCH-AT MATCH-T DTMaster OrthoMaster OrthoVista 五个模块
- 2 - 1
MATCH-AT 自 动 空 三加密 SSTTEEPP11 新建工程,需要以下几个数据: 数字影像 相机文件 外方位元素初始值 外业控制资料(控制点成果和刺点片) - 3 - 工作内容 •指定项目名称 •载入近似中心(GPS、INS) •载入图像 •确定单位,像素大小,照相机的名称和 mount rotation,地形高度 •自动设定块 打开Match-AT,点击,下拉点击弹出对话窗 ①输入工程名和存储路径 ②导入航片初始坐标,即根据航摄索引图等初设概略航片坐标
- 4 - 格式如下 2750 388000 5000000 3000 /航片号 X 坐标 Y 坐标 Z 坐标 2749 389000 5000000 3000 2748 390000 5000000 3000 # /航带分隔符 2779 360000 4997000 3000 2780 361000 4997000 3000 2781 362000 4997000 3000 # … … … … - 5 - # 如果是GPS 辅助摄影,按 #