精品文档---下载后可任意编辑7
1 任务目标掌握带参数例行程序的使用方法
掌握中断程序的使用方法
利用所学 RAPID 指令模拟弧焊程序
2 任务描述掌握带参数例行程序的使用,将之前的数字运算的程序进行改造,变成带参数形式
(附-1)使用自定义功能,自己实现 Offs 功能和 Abs 功能,需使用带参数的功能、功能返回值以及复杂数据的赋值方法实现
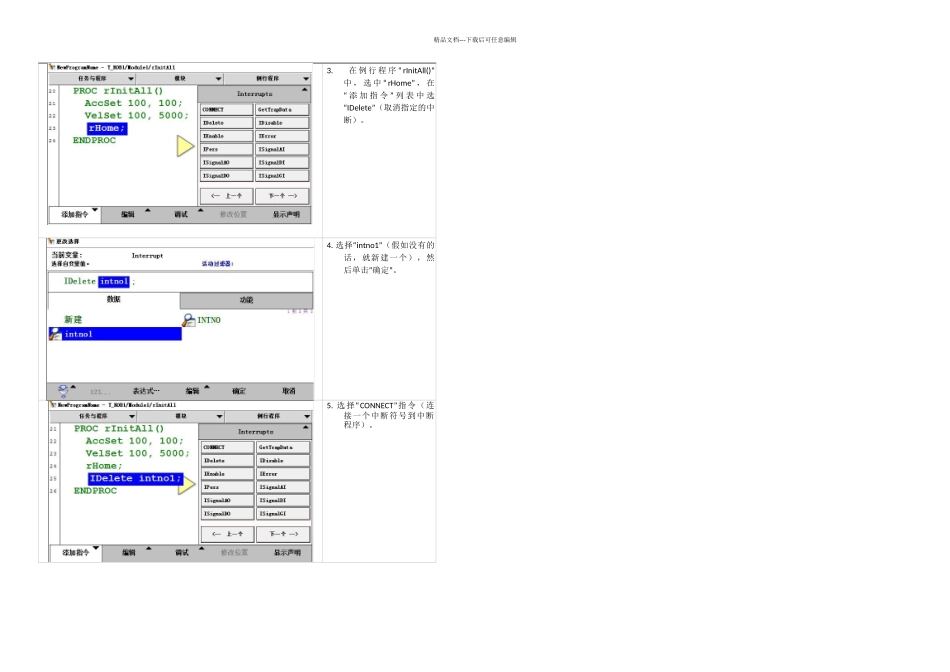
(附-2)掌握中断程序的使用(1)使用 di 信号触发中断程序,每次触发,均使系统用户变量 reg1 进行+1 的操作,当 reg1>10 时,将 reg1 重置为 1
(2)使用 ITimer 指令进行定时间隔为 1s 的中断触发,每次触发使系统用户变量 reg2 进行+1 的操作,当reg2>10 时,将 reg2 重置为 1
(附-3)利用学过的运动指令和 I/O 控制指令,模拟弧焊程序
(附-4)在模拟弧焊程序的基础上,再添加 1-2 个工件,使用工件坐标转换的方式进行编程
(附-5)改造工件坐标的模拟弧焊轨迹程序,使用带参数例行程序实现工件坐标的传值,并使用中断,来控制每个桌子只执行一次,触发中断后,再开始新的轨迹
(附-6)7
3 知识储备7
1 带参数的例行程序用参数调用子例行程序,子例行程序可能包含交接的参数
参数在子例行程序的局部变量表中定义
参数必须有一个符号名、一个变量类型和一个数据类型
可向子例行程序交接 16 个参数或从子例行程序交接 16 个参数
精品文档---下载后可任意编辑7
2 中断程序在 RAPID 程序执行过程中,假如出现需要紧急处理的情况,机器人会中断当前的执行,程序指针 PP 马上跳转到专门的程序中对紧急的情况进行相应的处理,处理结束后程序指针 PP 返回到原来被中断的地方,继续往下执行程序
这种专门用来处理紧急情况的专门程序,称作中断程序(TRAP)