运动控制系统仿真 专 业:电气工程及其自动化 班 级:041141 学 号:04114067 姓 名:何爽 1
转速反馈控制直流调速系统 各环节参数如下: 直流电动机:额定电压UN=220V,额定电流IdN=55A,额定转速nN=1000r/min,电动机电动势系数Ce=0
192Vmin/r 假定晶闸管整流装置输出电流可逆,装置的放大系数Ks=44,滞后时间常数Ts=0
00167s 电枢回路总电阻R=1
0Ω ,电枢回路电磁时间常数Tl=0
00167s,电力拖动系统机电时间常数Tm=0
075s 转速反馈系数α=0
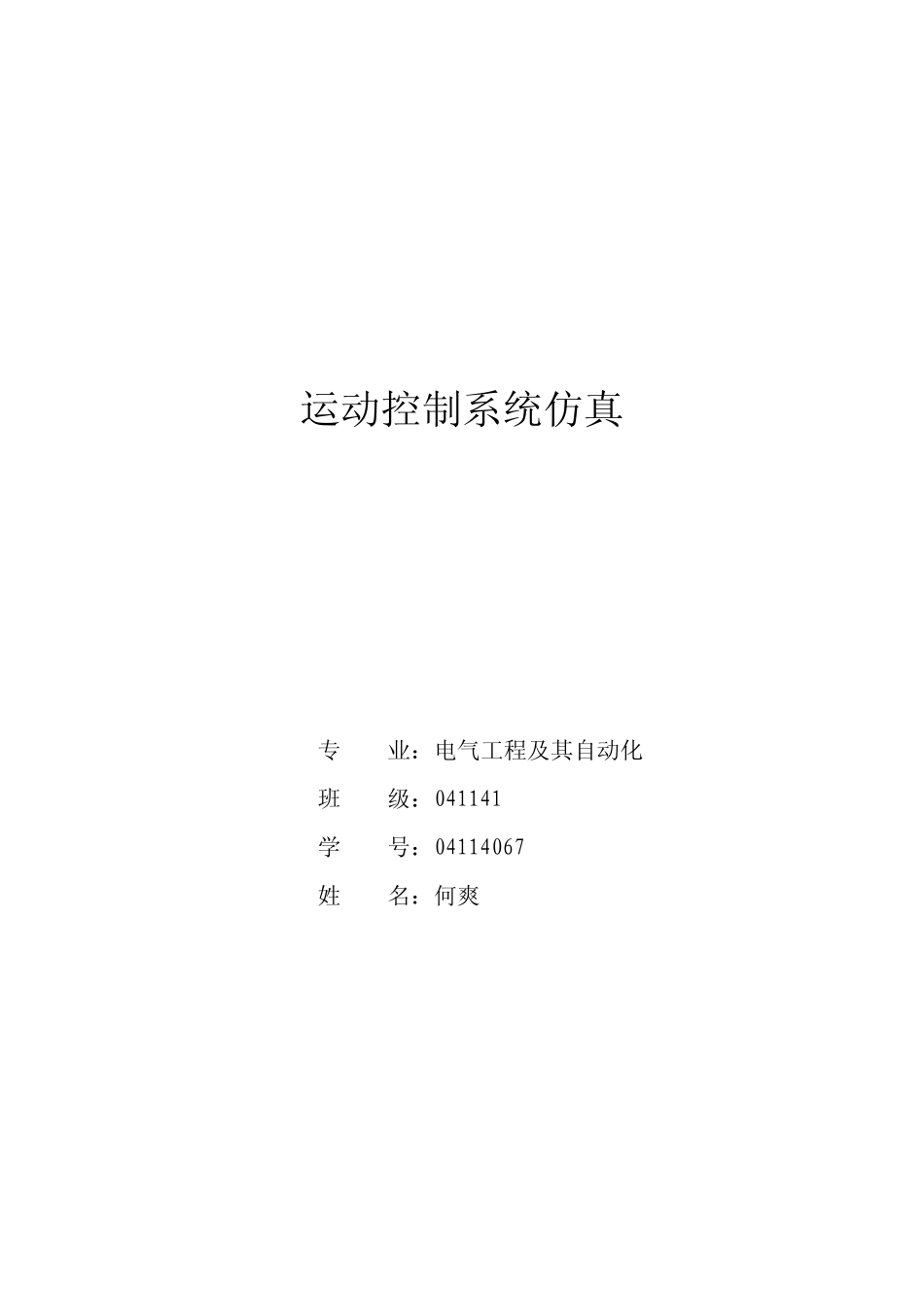
01Vmin/r 对应额定转速时的给点电压Un*=10V 1、单闭环无静差转速负反馈调速系统的仿真 PI控制器在于被控对象串联时,相当于在系统中增加了一个位于原点的开环极点,同时也增加了一个位于 s左半平面的开环零点
位于原点的极点可以提高系统的型别,以消除或减小系统的稳态误差,改善系统的稳态性能,而增加得负实部零点则可减小系统的阻尼程度
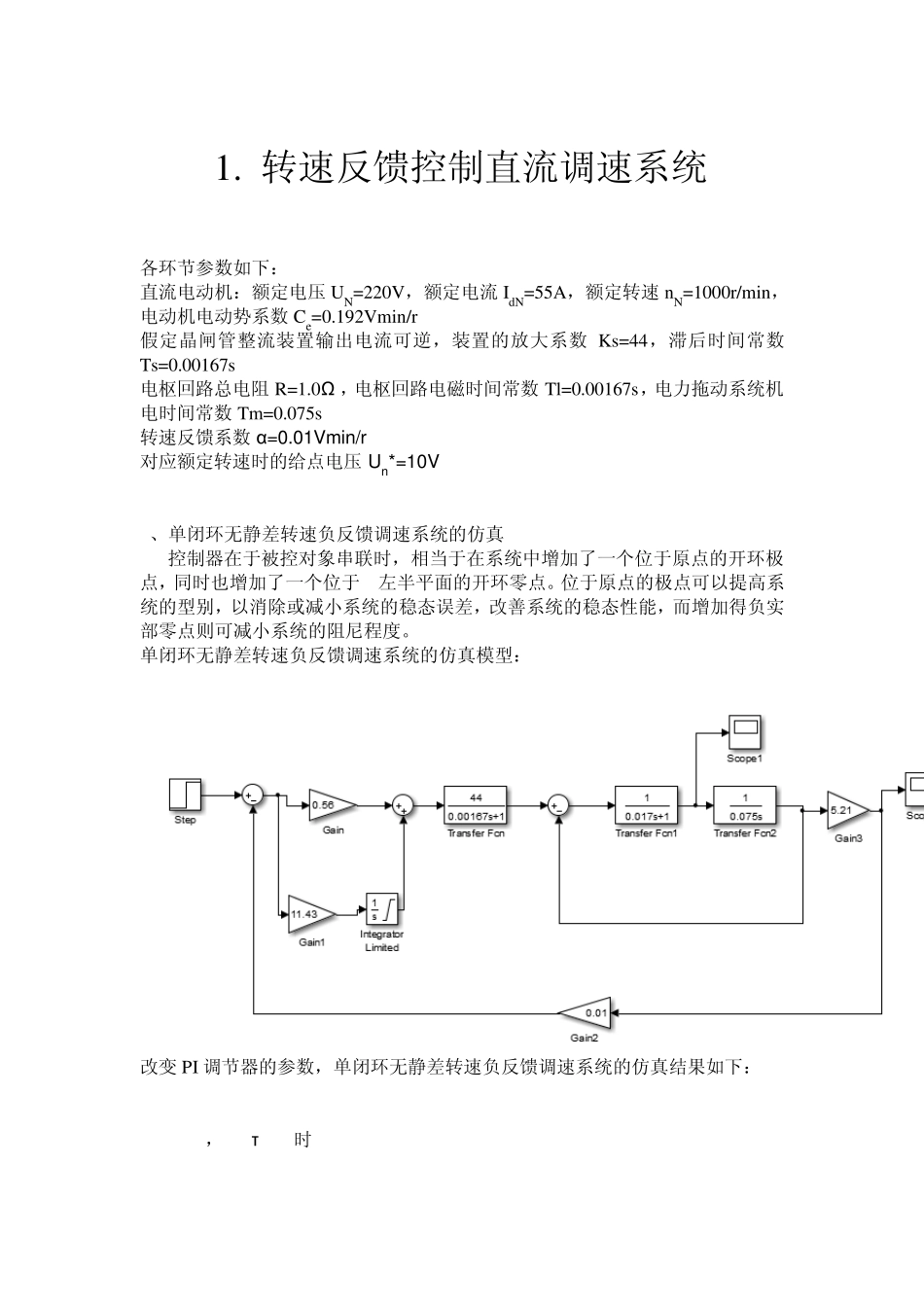
单闭环无静差转速负反馈调速系统的仿真模型: 改变 PI 调节器的参数,单闭环无静差转速负反馈调速系统的仿真结果如下: Kp=0
25, 1/τ =3时 转速 电流 Kp=0
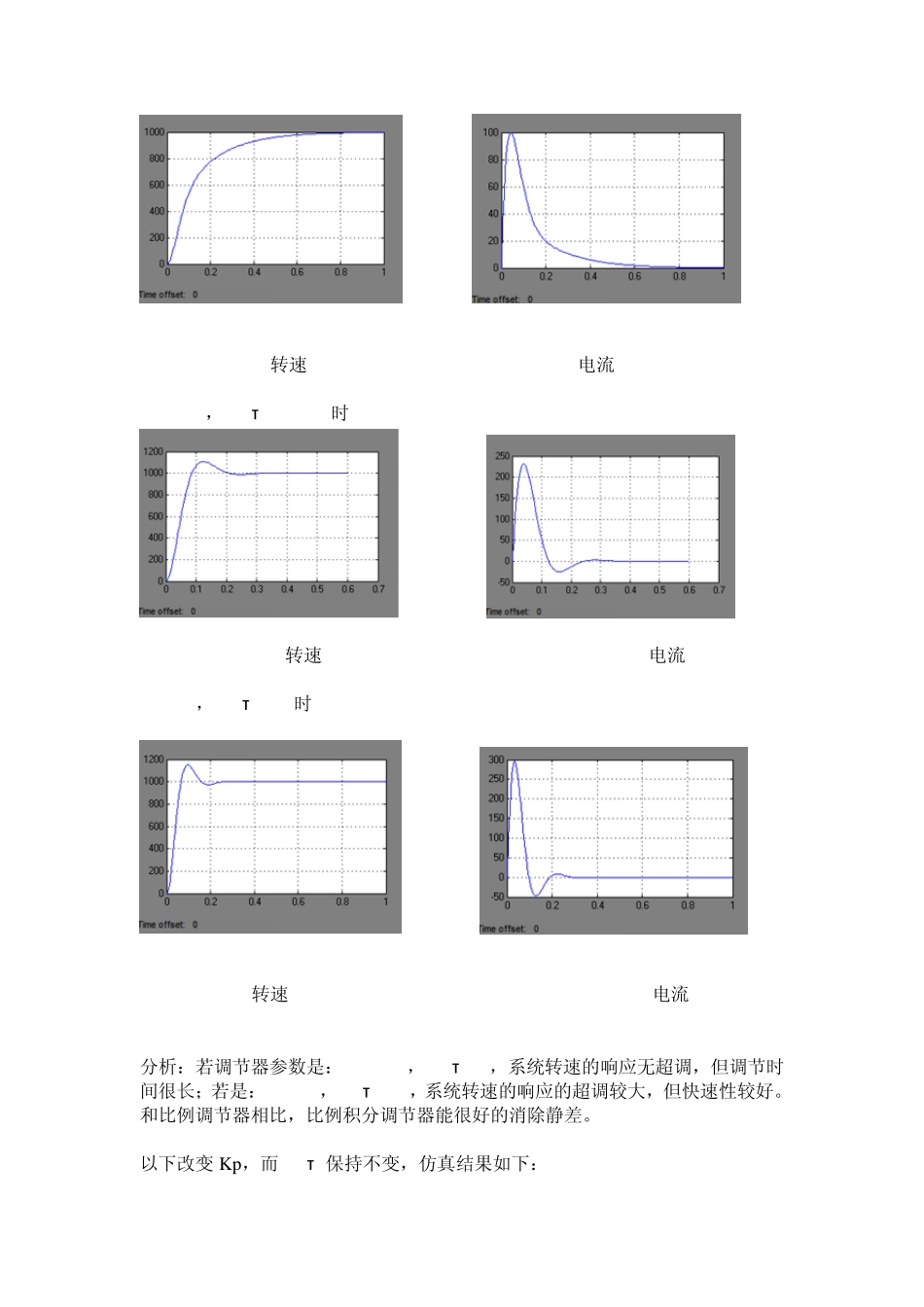
56, 1/τ =11
43时 转速 电流 Kp=0
8, 1/τ =15时 转速 电流 分析:若调节器参数是:Kp=0
25, 1/τ =3,系统转速的响应无超调,但调节时间很长;若是:Kp=0
8, 1/τ =15,系统转速的响应的超调较大,但快速性较好
和比例调节器相比,比例积分调节器能很好的消除静差
以下改变 Kp,而 1/τ 保持不变,仿真结果如下: Kp=10, 1/τ =15时 转速 电流 Kp=10, 1/τ =15时 转速 电流 Kp=20, 1/τ =15时 转速 电流 Kp=30, 1/τ =15时 转速 电流 可见在积分