精品文档---下载后可任意编辑课程名称:《 PLC 技术与工程应用》 课题名称:机械手电气控制系统设计 系部名称:专业班级:姓 名:学 号:2024 年 06 月 20 日精品文档---下载后可任意编辑目录1 引言- 1 -2 系统总体方案设计 12
1 系统硬件配置及组成原理 12
2 系统变量定义及分配表 22
3 系统接线图设计 33 控制系统设计 33
1 程序流程图 33
2 控制程序设计思路 44 程序调试 44
1 调试设备 44
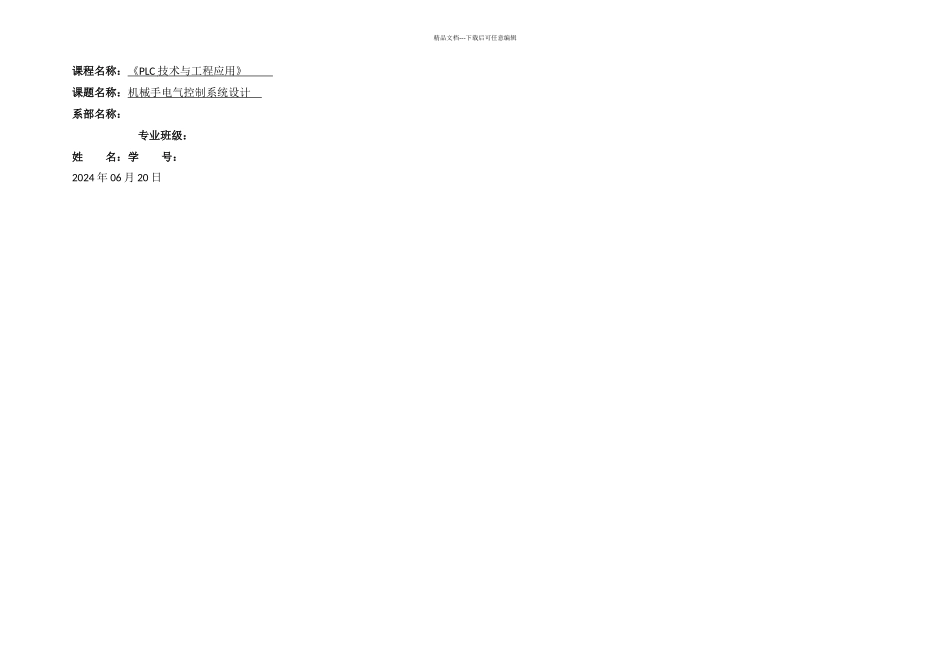
2 遇到的问题与解决方法 55 上位机监控系统设计 66 心得体会 Error: Reference source not found参考文献 6附录程序清单 6精品文档---下载后可任意编辑1 引言机械手是工业控制和加工中常常用到的执行部件,具有能适应恶劣工作环境、效率高、安全稳定和可进行高强度工作的优点,在自动化生产线上有广泛的应用
在现代工业中,生产过程的机械化,自动化已成为突出的主题
化工等连续性生产过程的自动化已基本得到解决
专用机床是大批量生产自动化的有效的办法;控制机床、数控机床、加工中心等自动化机械是有效地解决多品种小批量生产自动化的重要办法
但除切削加工本身外,还有大量的装卸、搬运、装配等作业,有待于进一步实现机械化,工业机械手就是为实现这些工序的自动化而生产的
机械手是能够模仿人体上肢的部分功能,可以对其进行自动控制使其根据预定要求输送制品或操持工具进行生产操作的自动化生产设备
为工业机械手设计一个技术性能优良的控制系统,对于提高工业机械手的整体技术性能来说具有十分重要的意义
本设计正是针对这一课题,选择了可编程控制器(PLC)作为工业机械手的控制系统,这对提升工业机械手的整体技术性能起到了良好的作用
本设计的电动组合机械手分别由四个不同功能的驱动电机及相应的机械传动装置构成;它们是:旋转电机、水平(X 轴)伸缩