第五章 位移法 1 1 7 第五章 位移法 一 判 断 题 1
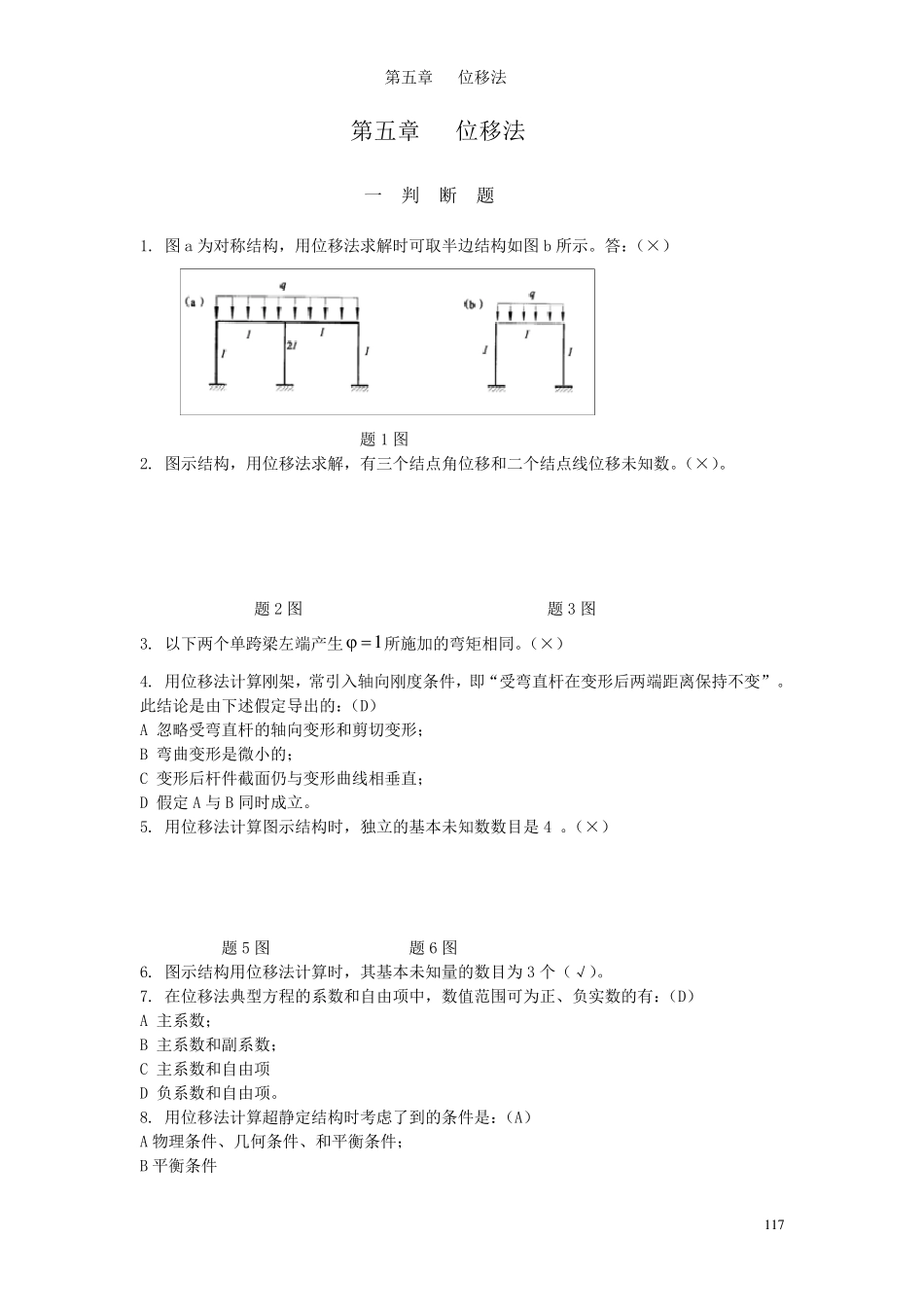
图a 为对称结构,用位移法求解时可取半边结构如图b 所示
答:(×) 题1 图 2
图示结构,用位移法求解,有三个结点角位移和二个结点线位移未知数
题2 图 题3 图 3
以下两个单跨梁左端产生1 所施加的弯矩相同
用位移法计算刚架,常引入轴向刚度条件,即“受弯直杆在变形后两端距离保持不变”
此结论是由下述假定导出的:(D) A 忽略受弯直杆的轴向变形和剪切变形; B 弯曲变形是微小的; C 变形后杆件截面仍与变形曲线相垂直; D 假定 A 与 B 同时成立
用位移法计算图示结构时,独立的基本未知数数目是 4
(×) 题5 图 题6 图 6
图示结构用位移法计算时,其基本未知量的数目为3 个(√)
在位移法典型方程的系数和自由项中,数值范围可为正、负实数的有:(D) A 主系数; B 主系数和副系数; C 主系数和自由项 D 负系数和自由项
用位移法计算超静定结构时考虑了到的条件是:(A) A 物理条件、几何条件、和平衡条件; B 平衡条件 第五章 位移法 1 1 8 C 平衡条件与物理条件 D 平衡条件与几何条件 9
规定位移法的杆端弯矩正负时,对杆端而言,以顺时针为正,对结点则以逆时针为正,这一规定也适合于杆端剪力的符号规定
(×) 10
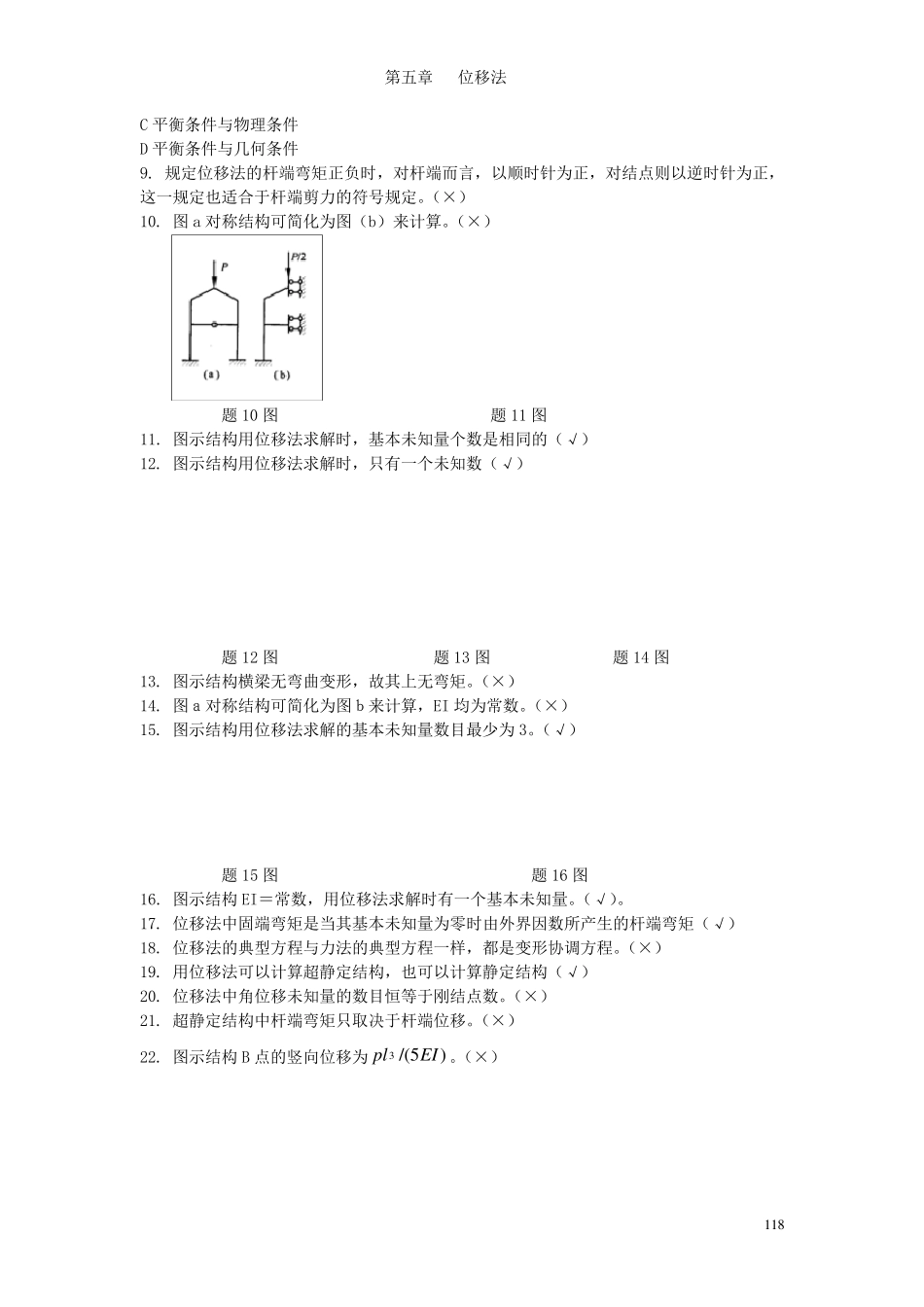
图 a 对称结构可简化为图(b)来计算
(×) 题 10 图 题 11 图 11
图示结构用位移法求解时,基本未知量个数是相同的(√) 12
图示结构用位移法求解时,只有一个未知数(√) 题 12 图 题 13 图 题 14 图 13
图示结构横梁无弯曲变形,故其上无弯矩
(×) 14
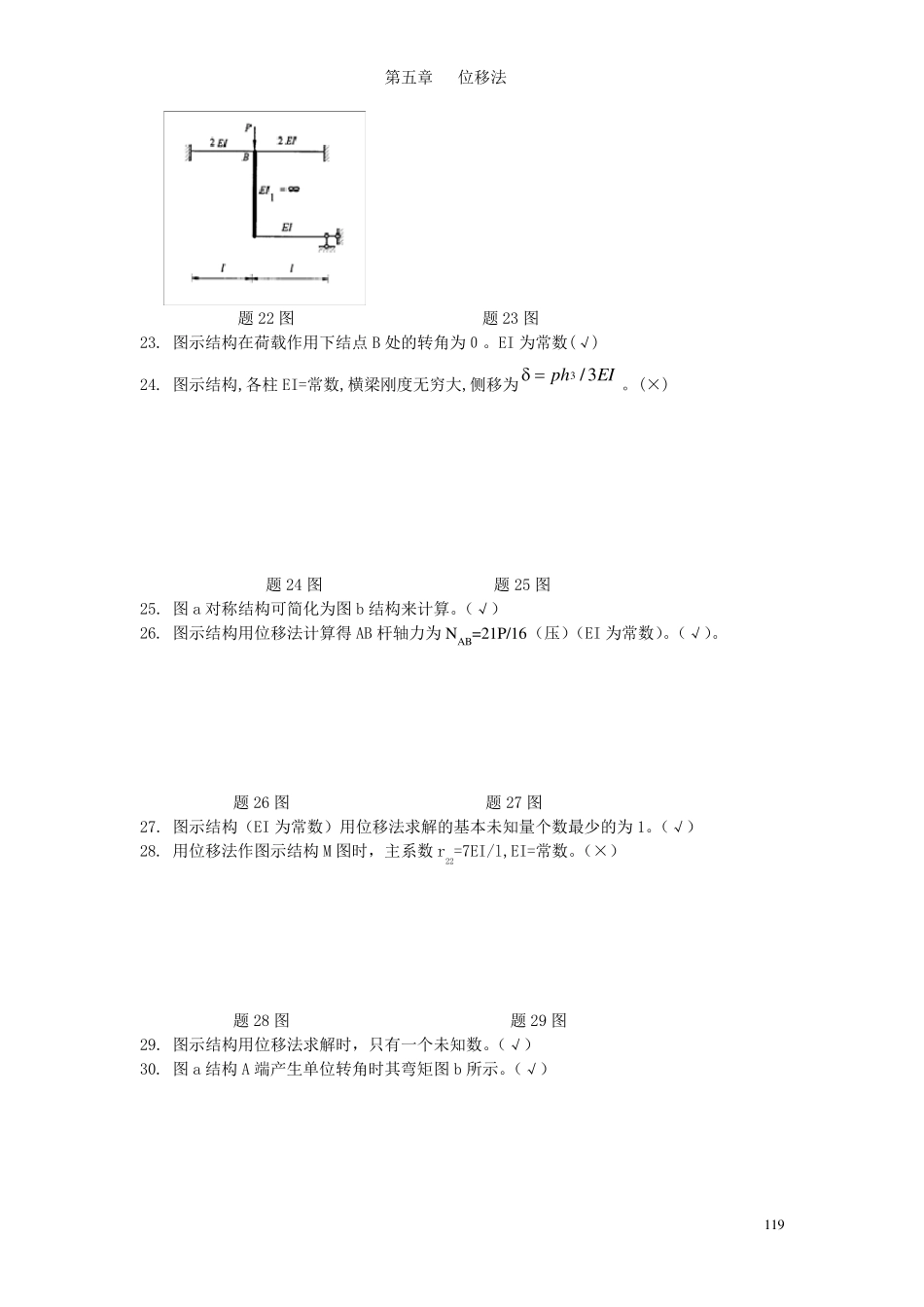
图a对称结构可简化为图b来计算,EI 均为常数
(×) 15
图示结构用位移法求解的基本未知量数目最少为3