精品文档---下载后可任意编辑题目的选择:三自由度机械手工作空间分析,θ1,θ2,θ3的转角范围-90˚~90˚,l0=1m,l1= l2=0
每个杆横截面积为 60mm×20mm 的矩形铁杆,θ1绕垂直 z 轴旋转,θ2,θ3在水平面内旋转
理论分析:从题干可以得知,首先此工作空间需要有三个杆组成,即 l0=1m,l1= l2=0
8m,可以在刚体中设置长度;其次,题目要求 θ1,θ2,θ3的转角范围-90˚~90˚,此项可以在信号发生器模块里面设置,本题信号均选择 π/2 的正弦波作为发生信号;第三,要求 θ1绕垂直 z 轴旋转,我的理解是模拟机械手的支撑单元杆,此结构会做原地的自传,也就是围着 Z 轴旋转,满足题目要求;最后,要求 θ2,θ3在水平面内旋转,这个比较好实现了,只要在刚体设置中,定好杆的位置就可以实现
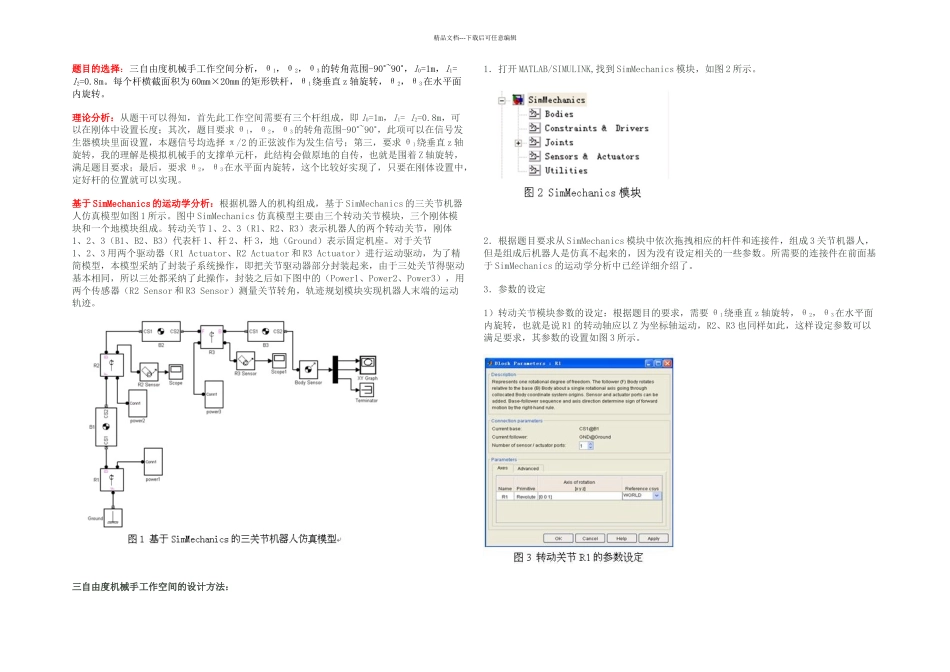
基于 SimMechanics 的运动学分析:根据机器人的机构组成,基于 SimMechanics 的三关节机器人仿真模型如图 1 所示
图中 SimMechanics 仿真模型主要由三个转动关节模块,三个刚体模块和一个地模块组成
转动关节 1、2、3(R1、R2、R3)表示机器人的两个转动关节,刚体1、2、3(B1、B2、B3)代表杆 1、杆 2、杆 3,地(Ground)表示固定机座
对于关节1、2、3 用两个驱动器(R1 Actuator、R2 Actuator 和 R3 Actuator)进行运动驱动,为了精简模型,本模型采纳了封装子系统操作,即把关节驱动器部分封装起来,由于三处关节得驱动基本相同,所以三处都采纳了此操作,封装之后如下图中的(Power1、Power2、Power3),用两个传感器(R2 Sensor 和 R3 Sensor)测量关节转角,轨迹规划模块实现机器人末端的运动轨迹
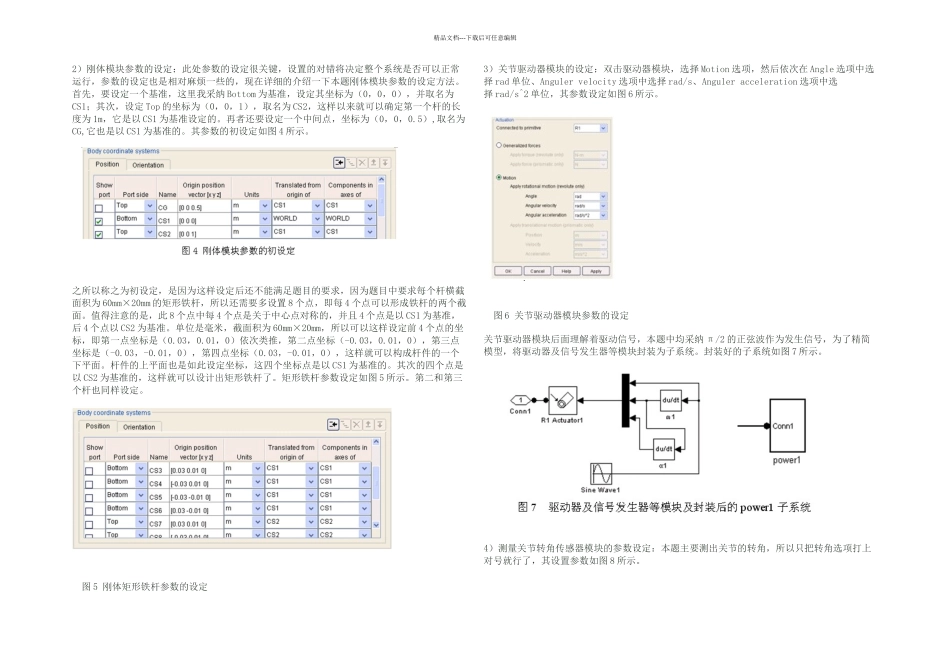
三自由度机械手工作空间的设计方法:1.打开 MA