精品文档---下载后可任意编辑毕业论文(设计)外 文 翻 译题 目:(翻译文献的中文题目)系部名称: 信息工程系 专业班级:自动 101 学生姓名:谢稼澍学 号:202407074142指导老师:熊珍凯老师职称:副教授2024 年 3 月 9 日精品文档---下载后可任意编辑基于涡轮 PMAC 的高精度运动控制系统的讨论摘要为了完成各种各样的关于移动对象的仿真测试,本文设计了基于涡轮 PMAC 一个高精度的运动控制系统
它总结了涡轮 PMAC 的特点,介绍了系统的组成和原理,着重阐明基于 PID +速度/加速度前馈的控制算法
为了减少系统的定位误差,通过线性插值法实现线性调整
通过调整 PID 控制参数的方法,系统具有良好的稳态特性和动态特性
试验结果表明,系统在性能稳定方面具有很好的可操作性
关键词:涡轮;PMAC;运动控制;PID;线性插补法Ⅰ、简介为了完成各种各样的关于移动对象的仿真测试,必须实现精确的追踪控制
对象应该在计算机的控制下遵循既定的速度和追踪计划移动到指定地点
现代工业技术进展日新月异,运动控制系统广泛应用于电子组装,超精度匹配、包装、纳米技术等不同领域的工业处理行业
这是一个智能、高效、拥有较高精度的系统,并且它正在提高整个自动化行业的高度
PID,作为一个典型的控制算法,已经在工业中广泛应用
经过历时 80 年的不懈讨论,PID控制器因为其结构简单、稳定性好、可靠性高,已成为工业控制的主要技术之一
本文讨论了一种基于涡轮 PMAC 开放式运动控制系统,它采纳了控制算法 PID +速度/加速度前馈
为了减少定位误差,线性调节应用于通过线性插值法猎取的目标位移曲线中
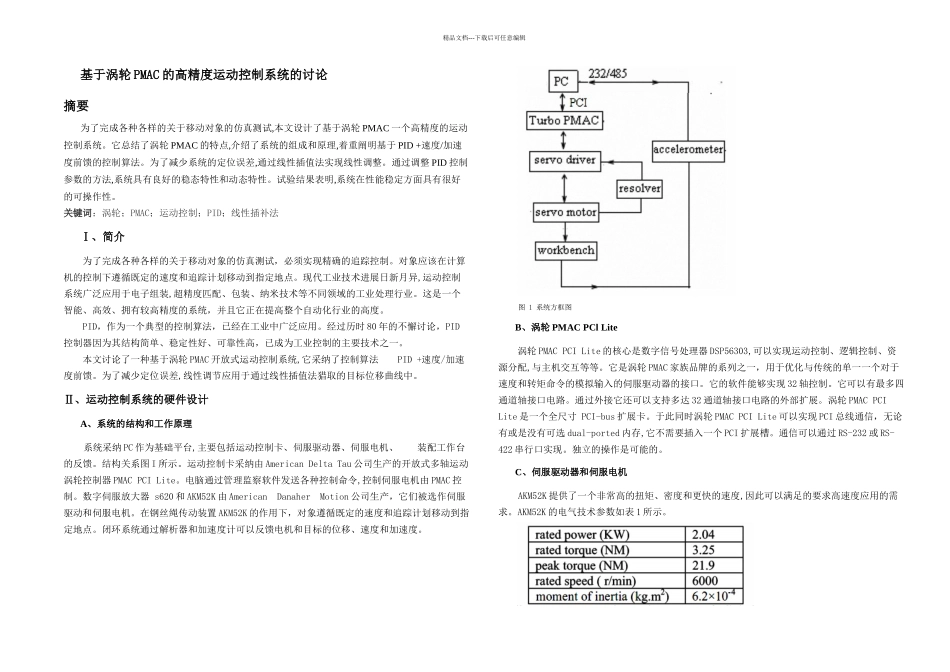
Ⅱ、运动控制系统的硬件设计A、系统的结构和工作原理系统采纳 PC 作为基础平台,主要包括运动控制卡、伺服驱动器、伺服电机、 装配工作台的反馈
结构关系图 I 所示
运动控制卡采纳由 Amer