栏杆机四杆机构运动学分析 1 四杆机构运动学分析 1
1 机构运动分析的任务、目的和方法 曲柄摇杆机构是平面连杆机构中最基本的由转动副组成的四杆机构,它可以用来实现转动和摆动之间运动形式的转换或传递动力
对四杆机构进行运动分析的意义是:在机构尺寸参数已知的情况下,假定主动件(曲柄)做匀速转动,撇开力的作用,仅从运动几何关系上分析从动件(连杆、摇杆)的角位移、角速度、角加速度等运动参数的变化情况
还可以根据机构闭环矢量方程计算从动件的位移偏差
上述这些内容,无论是设计新的机械,还是为了了解现有机械的运动性能,都是十分必要的,而且它还是研究机械运动性能和动力性能提供必要的依据
机构运动分析的方法很多,主要有图解法和解析法
当需要简捷直观地了解机构的某个或某几个位置的运动特性时,采用图解法比较方便,而且精度也能满足实际问题的要求
而当需要精确地知道或要了解机构在整个运动循环过程中的运动特性时,采用解析法并借助计算机,不仅可获得很高的计算精度及一系列位置的分析结果,并能绘制机构相应的运动线图,同时还可以把机构分析和机构综合问题联系起来,以便于机构的优化设计
2 机构的工作原理 在平面四杆机构中,其具有曲柄的条件为: a
各杆的长度应满足杆长条件,即: 最短杆长度+最长杆长度≤其余两杆长度之和
组成该周转副的两杆中必有一杆为最短杆,且其最短杆为连架杆或机架(当最短杆为连架杆时,四杆机构为曲柄摇杆机构;当最短杆为机架时,则为双曲柄机构)
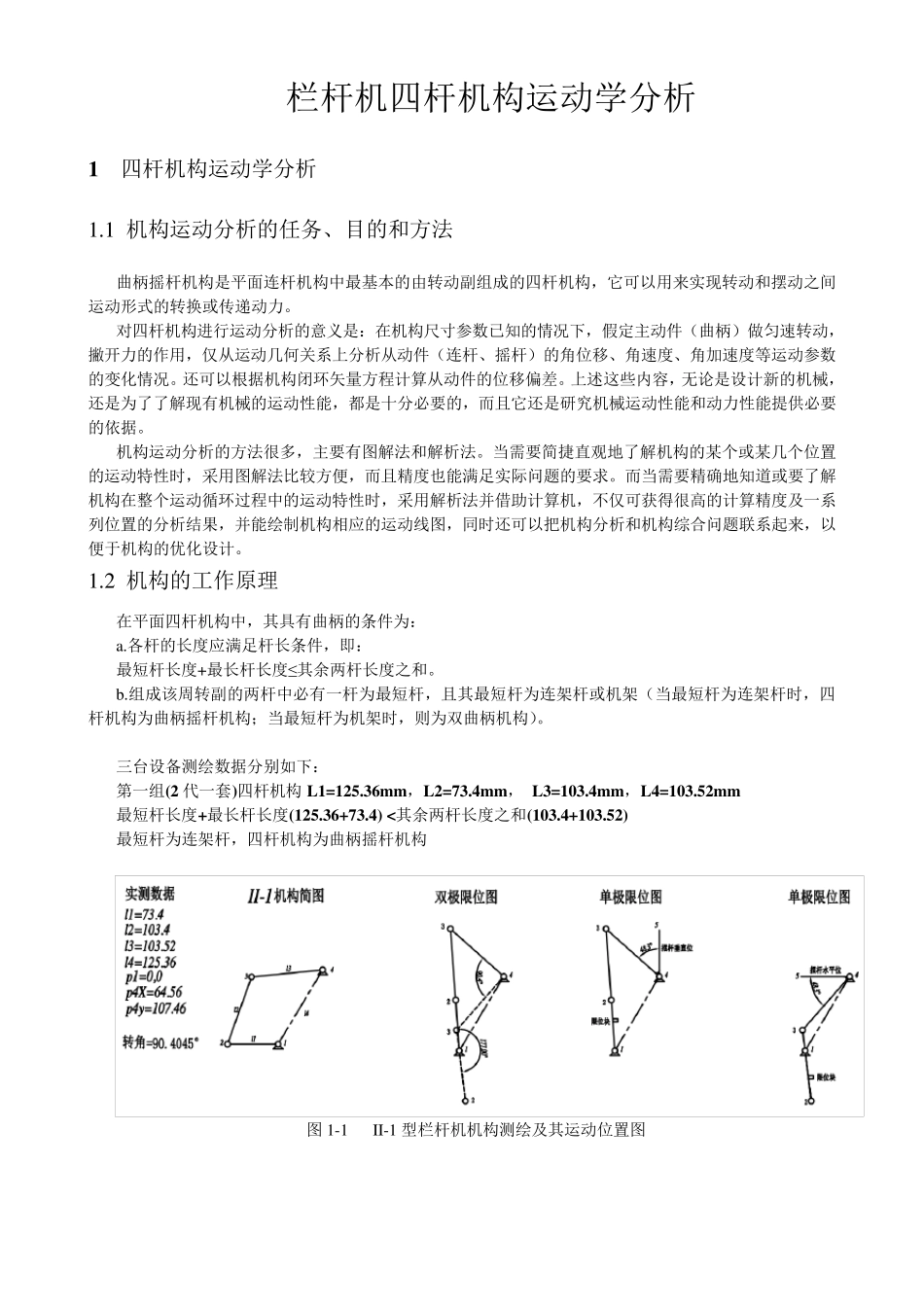
三台设备测绘数据分别如下: 第一组(2 代一套)四杆机构L1=125
36m m ,L2=73
4m m , L3=103
4m m ,L4=103
52m m 最短杆长度+最长杆长度(125