模糊控制的基本原理模糊控制是以模糊集合理论、模糊语言及模糊逻辑为基础的控制,它是模糊数学在控制系统中的应用,是一种非线性智能控制
模糊控制是利用人的知识对控制对象进行控制的一种方法,通常用“if条件,then结果”的形式来表现,所以又通俗地称为语言控制
一般用于无法以严密的数学表示的控制对象模型,即可利用人(熟练专家)的经验和知识来很好地控制
因此,利用人的智力,模糊地进行系统控制的方法就是模糊控制
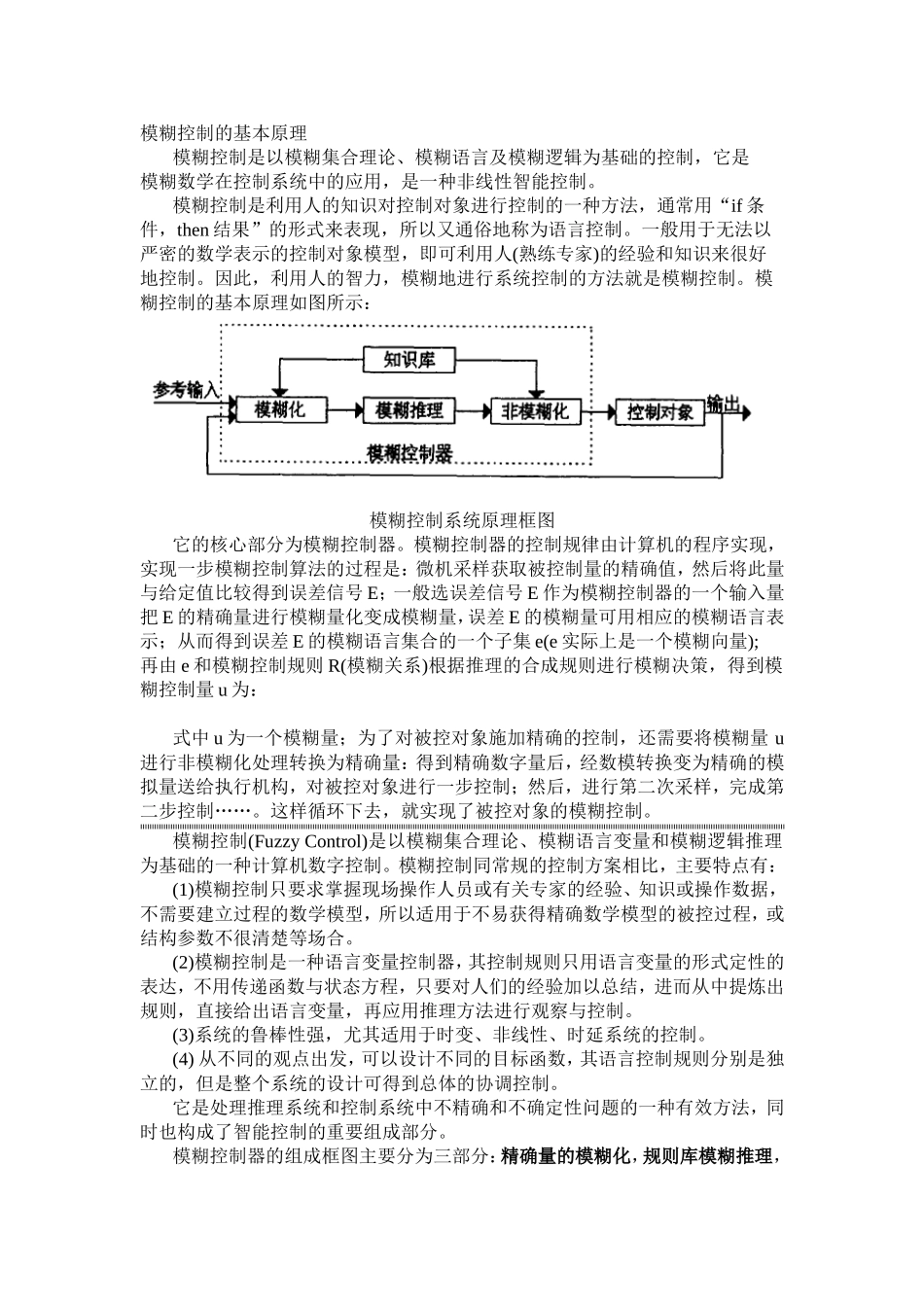
模糊控制的基本原理如图所示:模糊控制系统原理框图它的核心部分为模糊控制器
模糊控制器的控制规律由计算机的程序实现,实现一步模糊控制算法的过程是:微机采样获取被控制量的精确值,然后将此量与给定值比较得到误差信号E;一般选误差信号E作为模糊控制器的一个输入量把E的精确量进行模糊量化变成模糊量,误差E的模糊量可用相应的模糊语言表示;从而得到误差E的模糊语言集合的一个子集e(e实际上是一个模糊向量);再由e和模糊控制规则R(模糊关系)根据推理的合成规则进行模糊决策,得到模糊控制量u为:式中u为一个模糊量;为了对被控对象施加精确的控制,还需要将模糊量u进行非模糊化处理转换为精确量:得到精确数字量后,经数模转换变为精确的模拟量送给执行机构,对被控对象进行一步控制;然后,进行第二次采样,完成第二步控制……
这样循环下去,就实现了被控对象的模糊控制
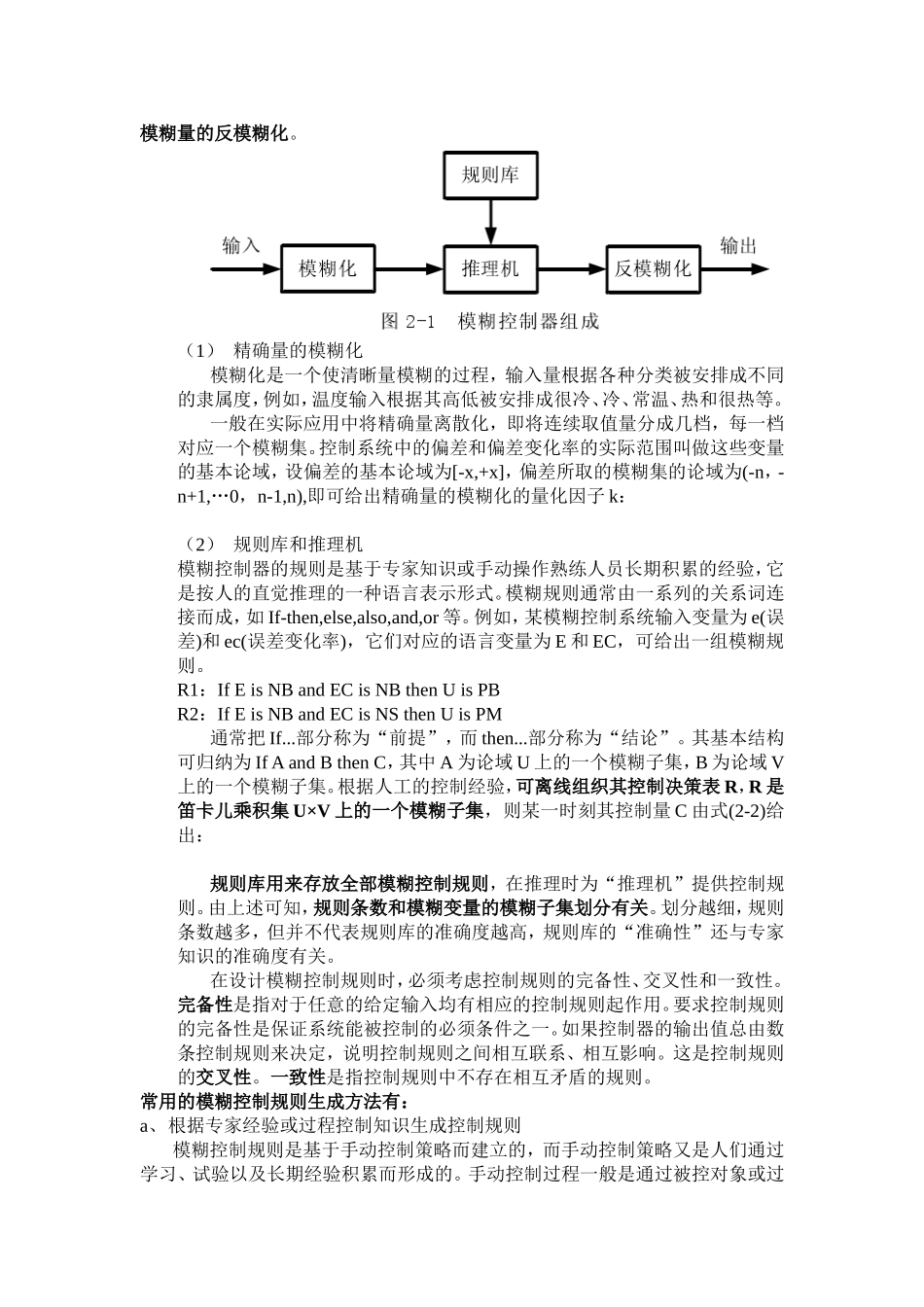
模糊控制(FuzzyControl)是以模糊集合理论、模糊语言变量和模糊逻辑推理为基础的一种计算机数字控制
模糊控制同常规的控制方案相比,主要特点有:(1)模糊控制只要求掌握现场操作人员或有关专家的经验、知识或操作数据,不需要建立过程的数学模型,所以适用于不易获得精确数学模型的被控过程,或结构参数不很清楚等场合
(2)模糊控制是一种语言变量控制器,其控制规则只用语言变量的形式定性的表达,不用传递函数与状态方程,只要对人们的经验加以总结,进而从中提炼