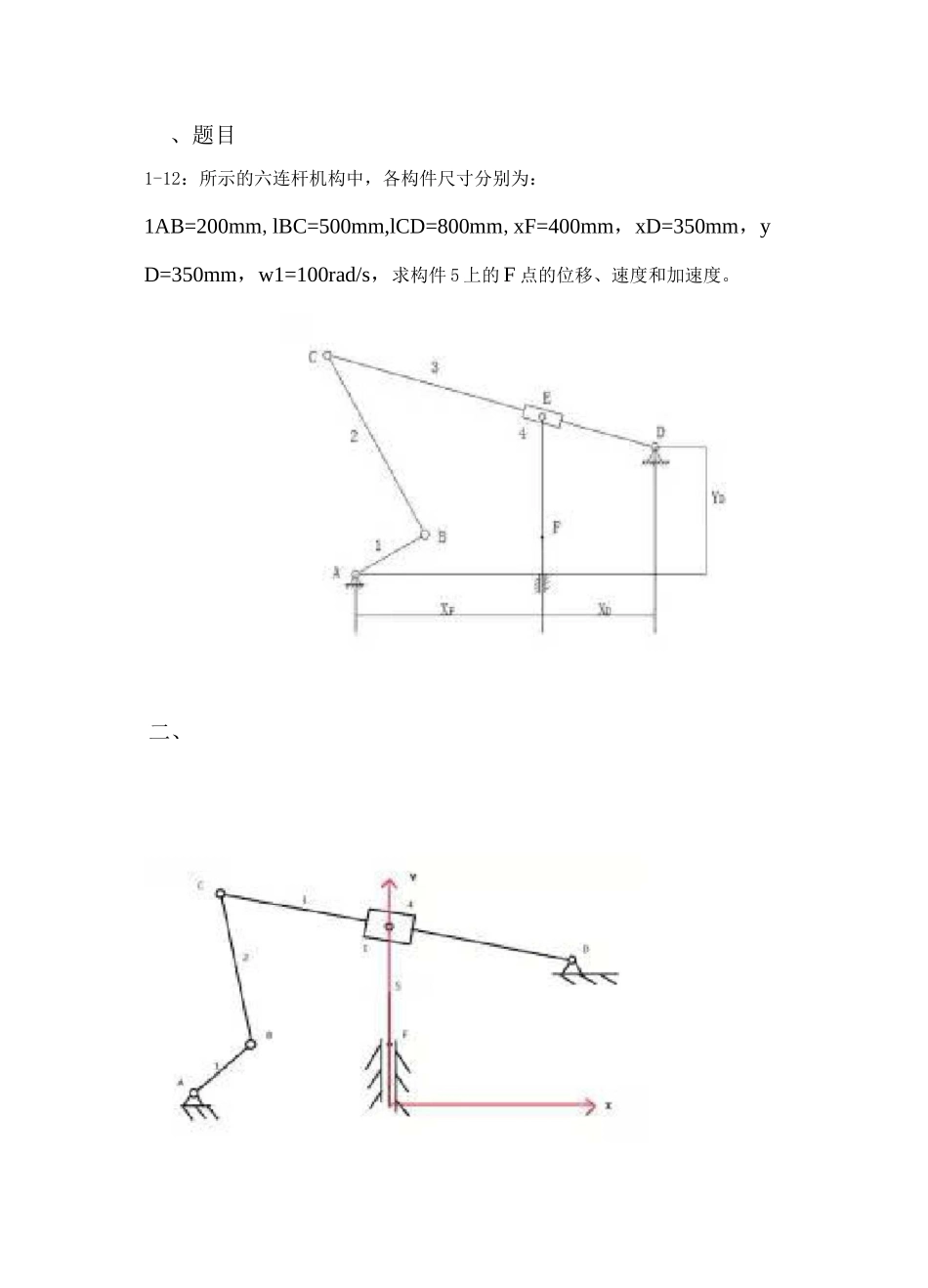
机械原理大作业课程名称:机械原理设计题目:连杆机构运动分析院系:机械工程院班级:xxxx学号:xxxxx设计者:xx设计时间:2016 年 6 月二、1•建立直角坐标以 F 点为直角坐标系的原点建立直角坐标系 X-Y,如下图所示。、题目1-12:所示的六连杆机构中,各构件尺寸分别为:1AB=200mm,lBC=500mm,lCD=800mm,xF=400mm,xD=350mm,yD=350mm,w1=100rad/s,求构件 5 上的 F 点的位移、速度和加速度。2. 机构结构分析该机构由 I 级杆组 RR(原动件 AB)、II 级杆组 RRR(杆 2、3)、II 级杆组PRP(杆 5、滑块 4)组成。3. 各基本杆组运动分析 1.1 级杆组 RR(原动件 AB)已知原动件 AB 的转角©=0—2 口原动件 AB的角速度w=10rad/s原动件 AB的角加速度a=0运动副 A 的位置可得:aA=0,aA=0xB=xA+lAB*cos(©)yB=yA+lAB*sin(©)速度和加速度分析:vxB=vxA-wl*AB*sin(①)vyB=vyA+w*lAB*sin(©)axB=axA-w2*lAB*cos(©)-e*lAB*sin(©)ayB=ayA-w2*lAB*sin(©)+e*lAB*cos(©)杆 2 的角位置、角速度、角加速度运动副 A 的速度运动副 A 的加速度xA=-400,yA=0vA=0,vA=00P=-arctan[(yC-yD)/(xC-xD)]求导可得 C点的角速度和角加速度。3.II 级杆组 PRP(杆 5、滑块lBC=500mm,lCD=800mm,xD=350mm,yD=350mm,W2=arctan{[Bo+(Ao2+Bo2-Co2)^]/(Ao+Bo)}W3=arctan[(yC-yD)/(xC-xD)]Ao=2*LBC(xD-xB)Bo=2*LBC(yD-yB)lBD2=(xD-xB)2+(yD-yB)Co=lBC2+lBD2-lCD2xC=xB+lBC*cos(W2)yC=xB+lBC*sin(W2)xF=0yF=yD+xD*tan(&)—1EF求导可得 F 点的速度和加速度.三、程序设计t=0:pi/50000:pi/50;leng=length(t);a=0;x=-400+200*cos(a+100*t);y=200*sin(a+100*t);Vx=diff(x);Vy=diff(y);Ax=diff(x,2);Ay=diff(y,2);plot(x,y)%由 B 点和 D 点确定杆的角位置、角速度和角加速度:xb=200*cos(a+100*t)-400;yb=200*sin(a+100*t);xd=350;yd=350;A0=2*500*(xd-xb);B0=2*500*(yd-yb);C0=500*500+(xd-xb).A2+(yd-yb).A2-800*800;Ql=2.*atan(B0+(A0.*A0+B0.*B0-C0.*C0).A0.5/(A0+C0));xc=xb+500*cos(Q1);yc=yb+500*sin(Q1);Q2=atan((yc-yd)./(xc-xd));w1=diff(Q1);w2=diff(Q2);Vcx=diff(xc);Vcy=diff(yc);O1=diff(Q1,2);O2=diff(Q2,2);Acx=diff(xc,2);Acy=diff(yc,2);%已知杆 CD 的运动和移动副导路参数推出 F 点的运动:EF=250;xf=0;yf=350+350*tan(pi-Q2)-EF;Vfx=0;Vfy=diff(yf);Afx=0;Afy=diff(Vfy);for(m=1:(leng-1))t1(m)=t(m);endfor(m=1:(leng-2))t2(m)=t(m);end四、计算结果令a=0,EF=250;F 点位移:F 点 y 方向位移图:F 点速度图:F 点加速度图: