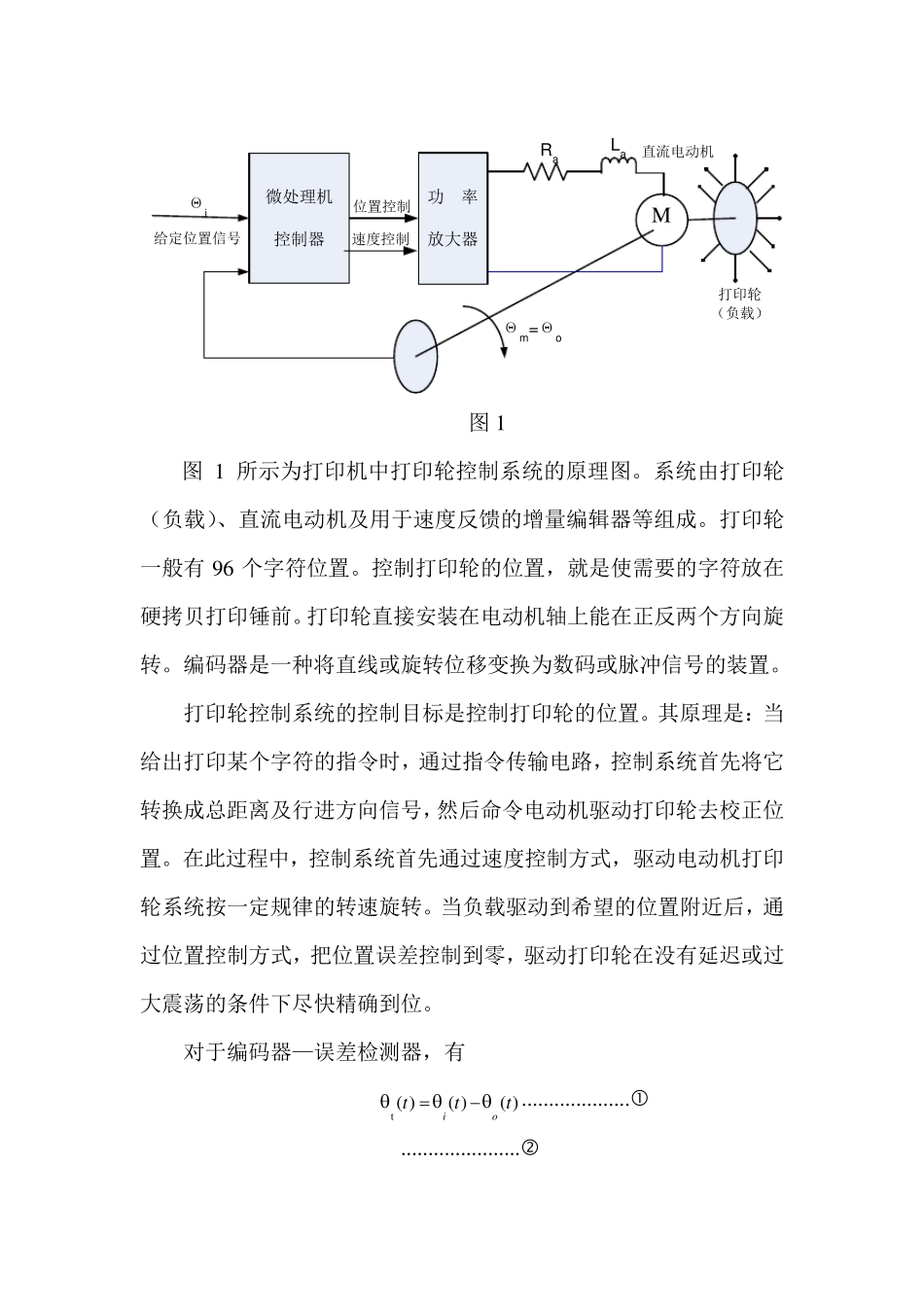
控制工程基础大作业 打印机中打印轮控制系统分析 学院:机械工程及自动化学院 班级:车辆工程2 班 姓名: 学号: M微处理机控制器功 率放大器位置控制给定位置信号ΘiΘm=Θo直流电动机RaLa打印轮(负载)速度控制 图 1 图 1 所示为打印机中打印轮控制系统的原理图
系统由打印轮(负载)、直流电动机及用于速度反馈的增量编辑器等组成
打印轮一般有 96 个字符位置
控制打印轮的位置,就是使需要的字符放在硬拷贝打印锤前
打印轮直接安装在电动机轴上能在正反两个方向旋转
编码器是一种将直线或旋转位移变换为数码或脉冲信号的装置
打印轮控制系统的控制目标是控制打印轮的位置
其原理是:当给出打印某个字符的指令时,通过指令传输电路,控制系统首先将它转换成总距离及行进方向信号,然后命令电动机驱动打印轮去校正位置
在此过程中,控制系统首先通过速度控制方式,驱动电动机打印轮系统按一定规律的转速旋转
当负载驱动到希望的位置附近后,通过位置控制方式,把位置误差控制到零,驱动打印轮在没有延迟或过大震荡的条件下尽快精确到位
对于编码器—误差检测器,有 )()()(ttttoi
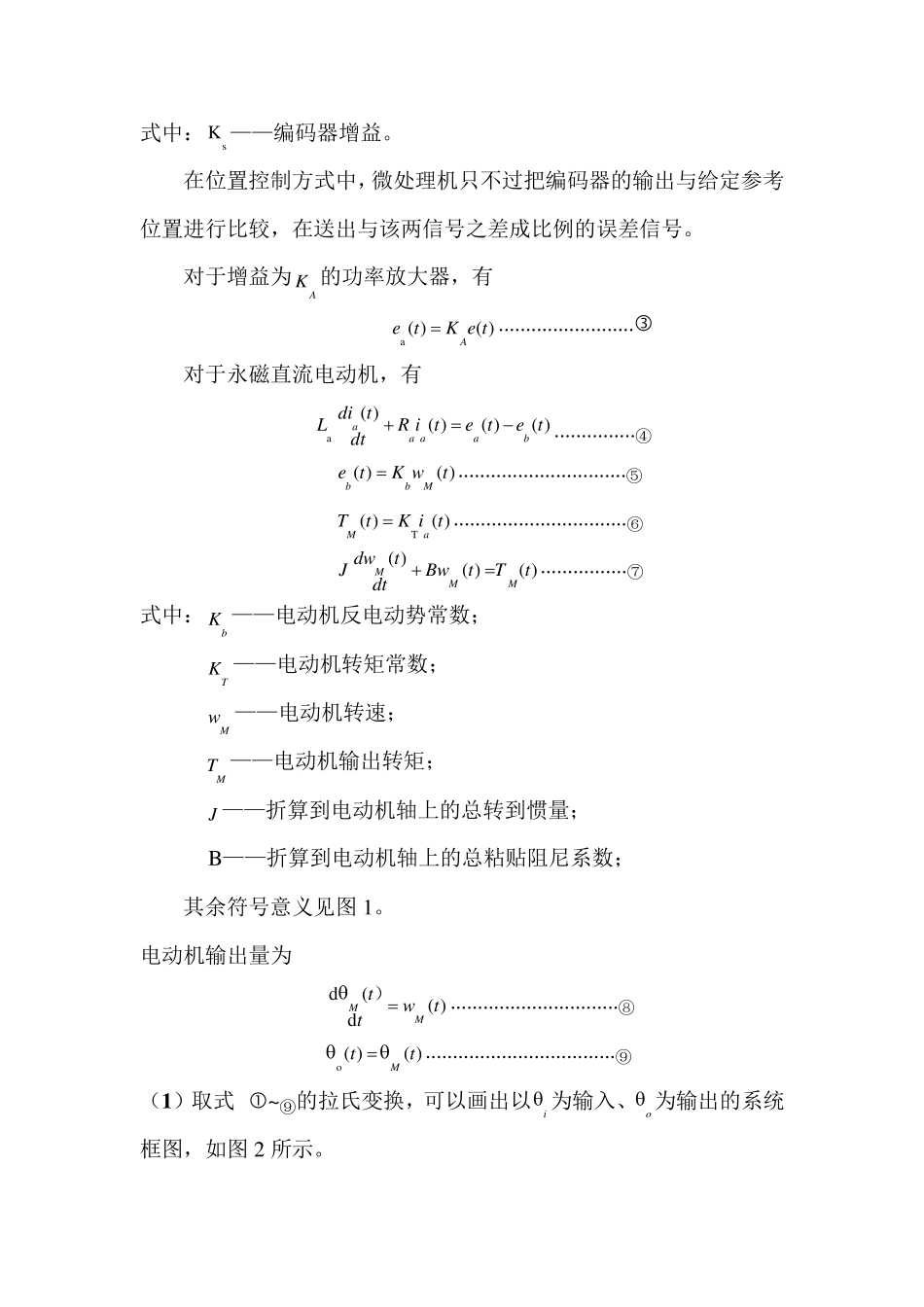
式中:sK ——编码器增益
在位置控制方式中,微处理机只不过把编码器的输出与给定参考位置进行比较,在送出与该两信号之差成比例的误差信号
对于增益为AK 的功率放大器,有 )()(ateKteA
对于永磁直流电动机,有 )()()()(atetetiRdttdiLbaaaa
④ )()(twKteMbb
⑤ )()(TtiKtTaM