1 1 前言 许多生产机械要求在一定的范围内进行速度的平滑调节,并且要求具有良好的稳态、动态性能
而直流调速系统调速范围广、静差率小、稳定性好以及具有良好的动态性能,在高性能的拖动技术领域中,相当长时期内几乎都采用直流电力拖动系统
双闭环直流调速系统是直流调速控制系统中发展得最为成熟,应用非常广泛的电力传动系统
由于该系统的结构较复杂,控制器可调参数较多,所以整个系统的设计和校正比较困难,需要有一个功能全面、分析方便的仿真设计平台
传统的仿真设计平台主要是 VC 和 Delphi 等高级语言环境,需要做大量的底层代码编写工作,很不方便,效率不高,仿真结果也不直观
自从MATLAB 的Simulink 推出以后,动态系统的仿真就变得非常容易了
因其含有极为丰富的专用于控制工程 与 系统分析的函 数,具有强 大的数学 计算 功能,且提 供 方便的图 形 绘 制功能,只 要在Simulink中画 出系统的动态结构图 模 型 ,编写极简 单 的程 序 ,即 可对 该系统进行仿真,效率极高,环境友 好,从而给 系统的设计和校正带 来 很大的方便
Matlab在学 术和许多实 际 领域都得到 广泛应用,已 成为国 际 控制界 应用最广的语言和工具
本 课 题 主要是在Simulink 环境中对 双闭环直流调速系统进行仿真设计,具体 内容有: 对 电流调节器和转 速调节器进行校正设计; 对 电流环和转 速环进行时域和频 域分析; 对 调速系统进行跟 随 性和抗 扰 性分析
2 2 双闭环直流调速系统的工作原理 2
1 双闭环直流调速系统的介绍 双闭环(转速环、电流环)直流调速系统是一种当前应用广泛,经济,适用的电力传动系统
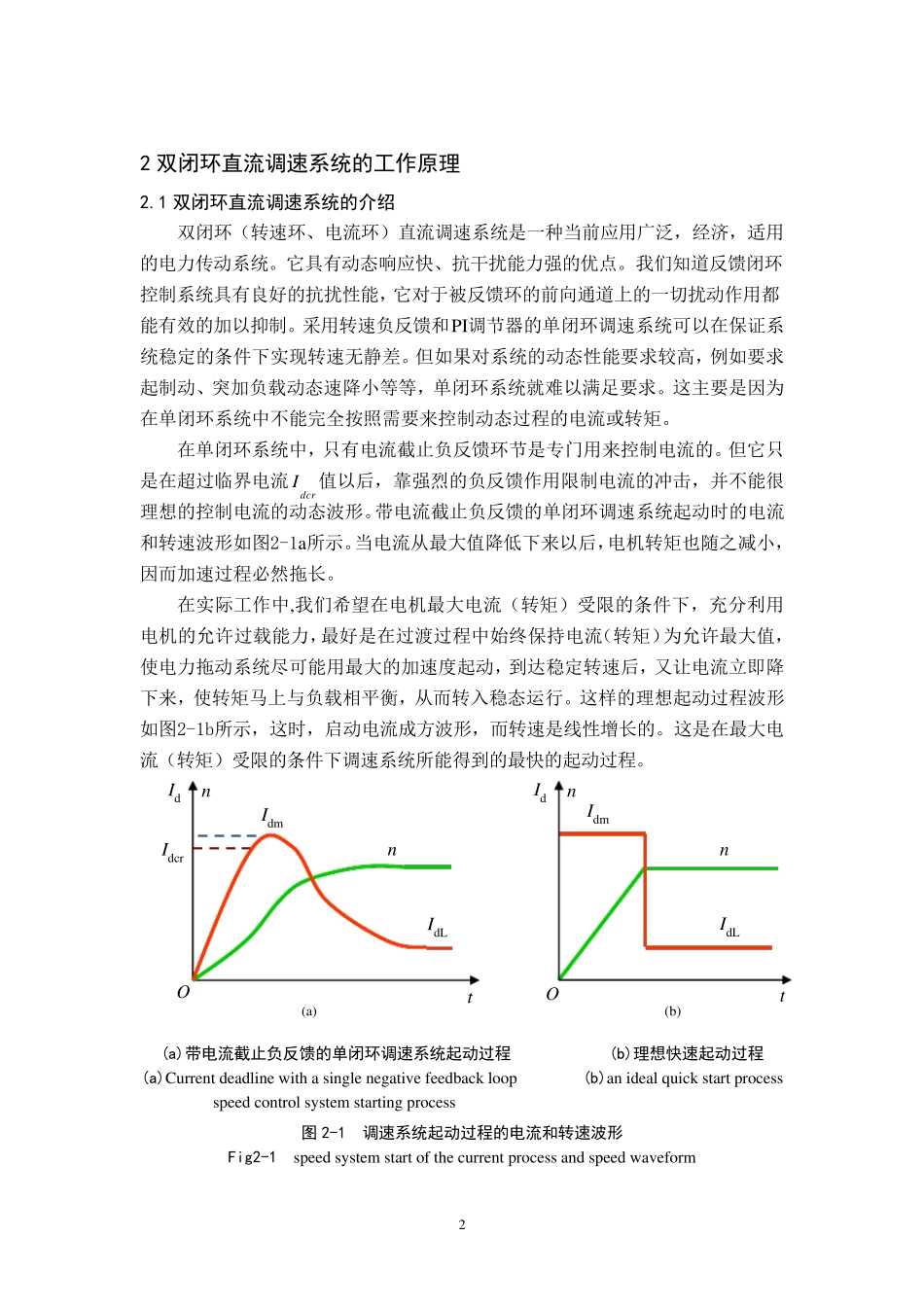
它具有动态响应快、抗干扰能力强的优点
我们知道反馈闭环控制系统具有良好的抗扰性能,它对于被反馈环的前向通道上的一切扰动作用都能有效的加以抑制
采用转速负反馈和P