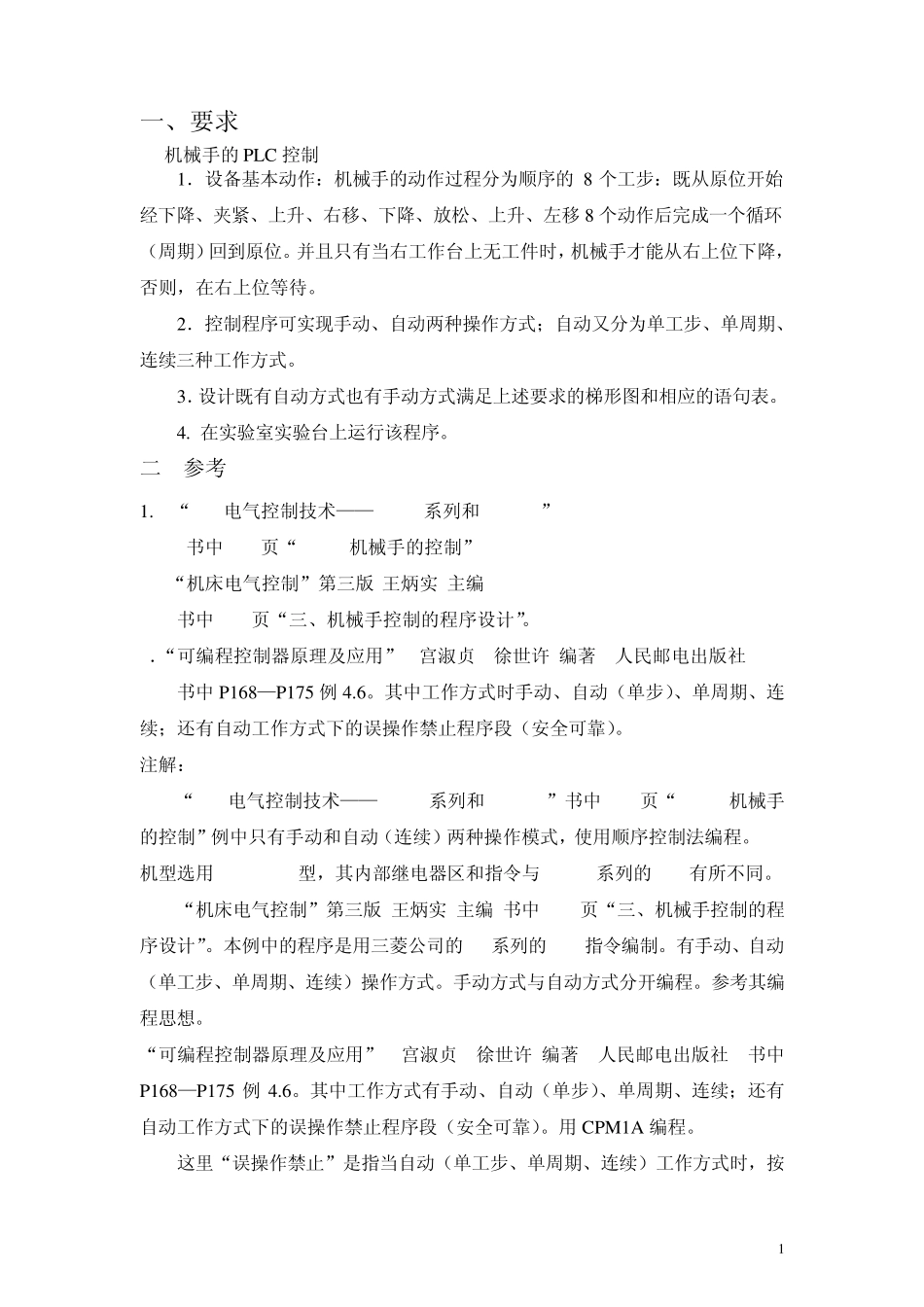
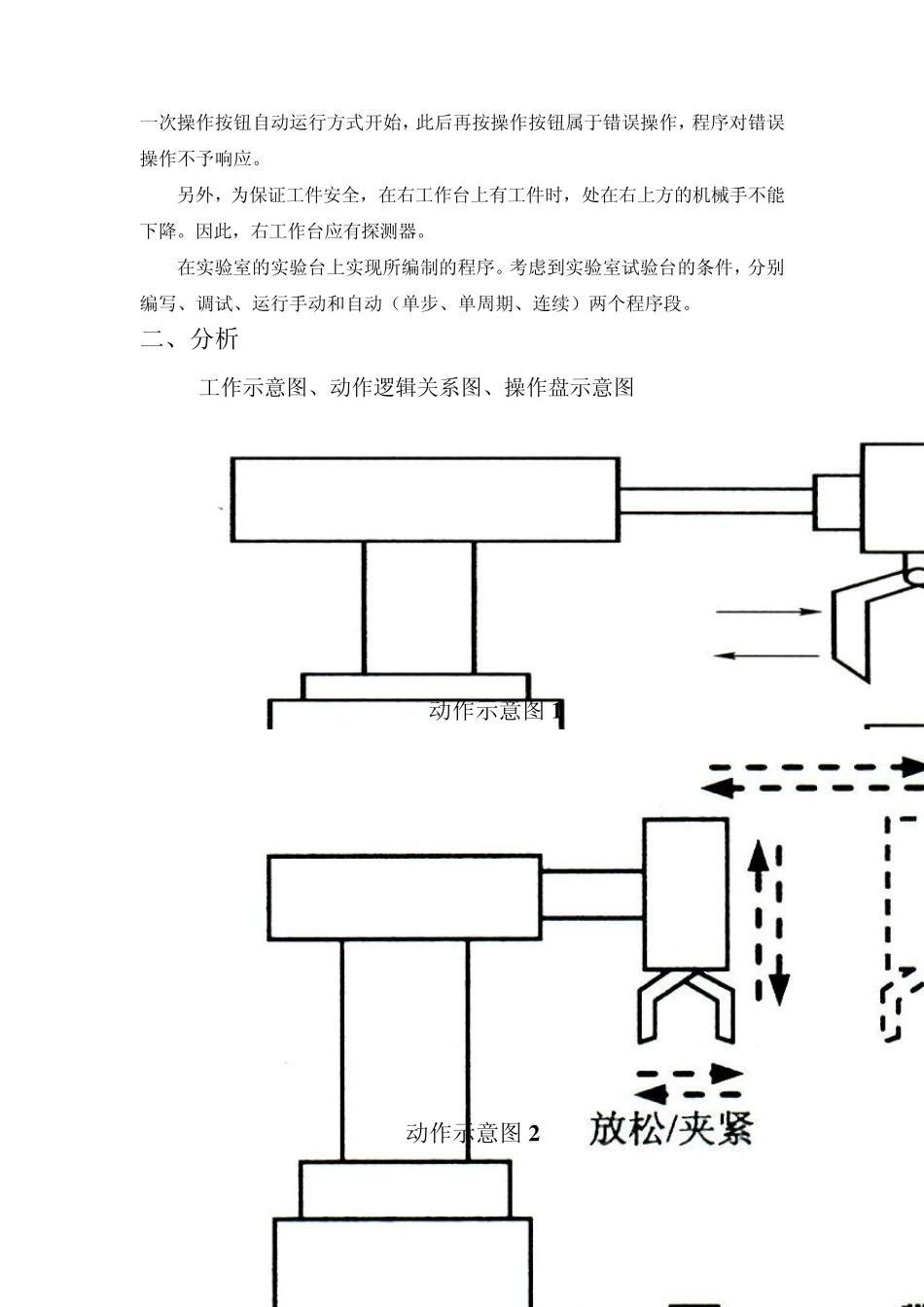
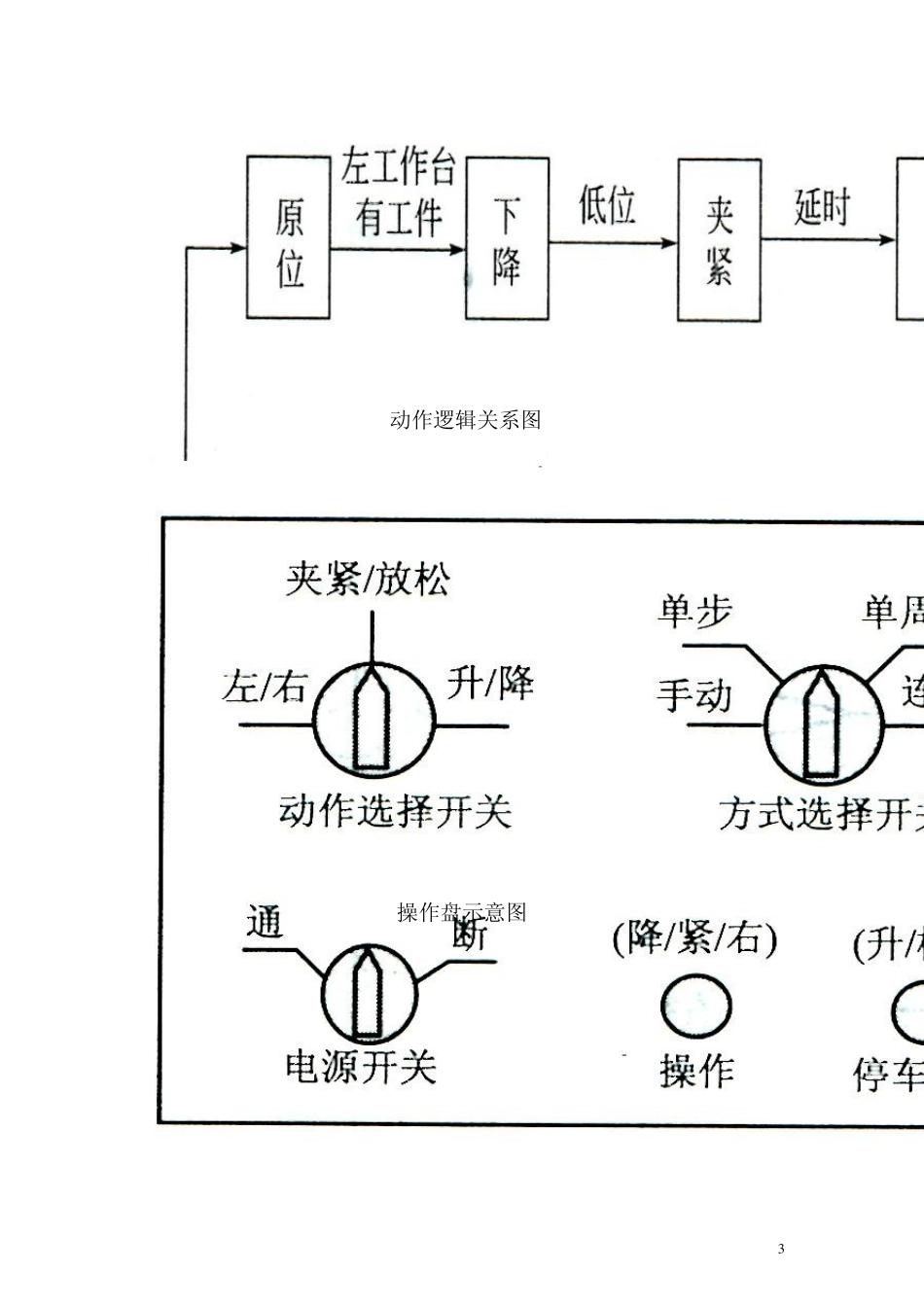
1 一、要求 机械手的PLC 控制 1.设备基本动作:机械手的动作过程分为顺序的8 个工步:既从原位开始经下降、夹紧、上升、右移、下降、放松、上升、左移8 个动作后完成一个循环(周期)回到原位
并且只有当右工作台上无工件时,机械手才能从右上位下降,否则,在右上位等待
2.控制程序可实现手动、自动两种操作方式;自动又分为单工步、单周期、连续三种工作方式
3.设计既有自动方式也有手动方式满足上述要求的梯形图和相应的语句表
在实验室实验台上运行该程序
二 参考 1
“PLC电气控制技术——CPM1A系列和S7-200” 书中 212页“8
3机械手的控制” 2
“机床电气控制”第三版 王炳实 主编 书中 156页“三、机械手控制的程序设计”
3.“可编程控制器原理及应用” 宫淑贞 徐世许 编著 人民邮电出版社 书中 P168—P175 例 4
其中工作方式时手动、自动(单步)、单周期、连续;还有自动工作方式下的误操作禁止程序段(安全可靠)
注解: “PLC电气控制技术——CPM1A系列和S7-200”书中 212页“8
3机械手的控制”例中只有手动和自动(连续)两种操作模式,使用顺序控制法编程
PLC机型选用 CPM2A-40型,其内部继电器区和指令与 CPM1A系列的CPM有所不同
“机床电气控制”第三版 王炳实 主编 书中 156页“三、机械手控制的程序设计”
本例中的程序是用三菱公司的F1系列的PLC指令编制
有手动、自动(单工步、单周期、连续)操作方式
手动方式与自动方式分开编程
参考其编程思想
“可编程控制器原理及应用” 宫淑贞 徐世许 编著 人民邮电出版社 书中P168—P175 例 4
其中工作方式有手动、自动(单步)、单周期、连续;还有自动工作方式下的误操作禁止程序段(安全可靠)
用 CPM1A 编程
这里“误操作禁止”