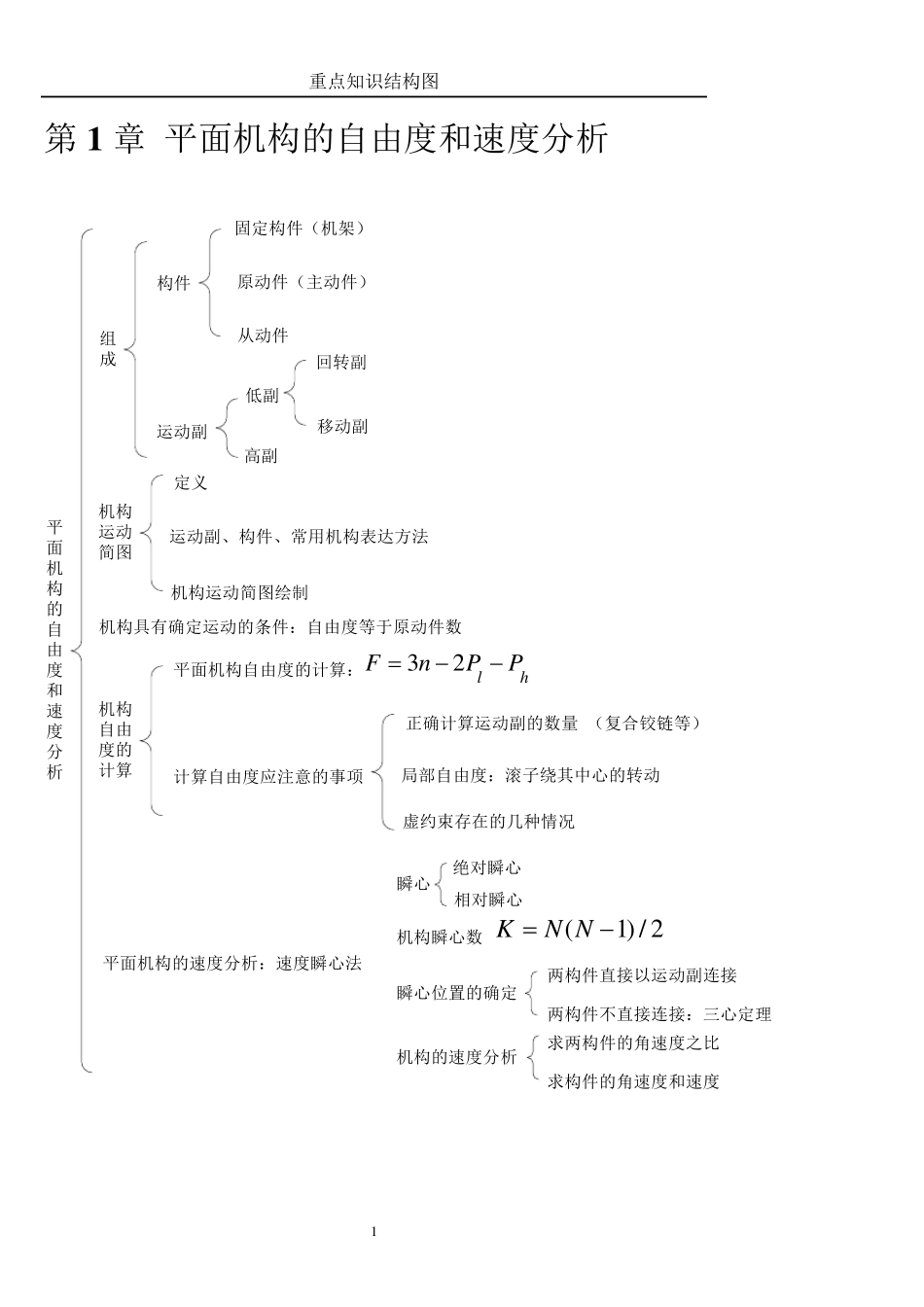
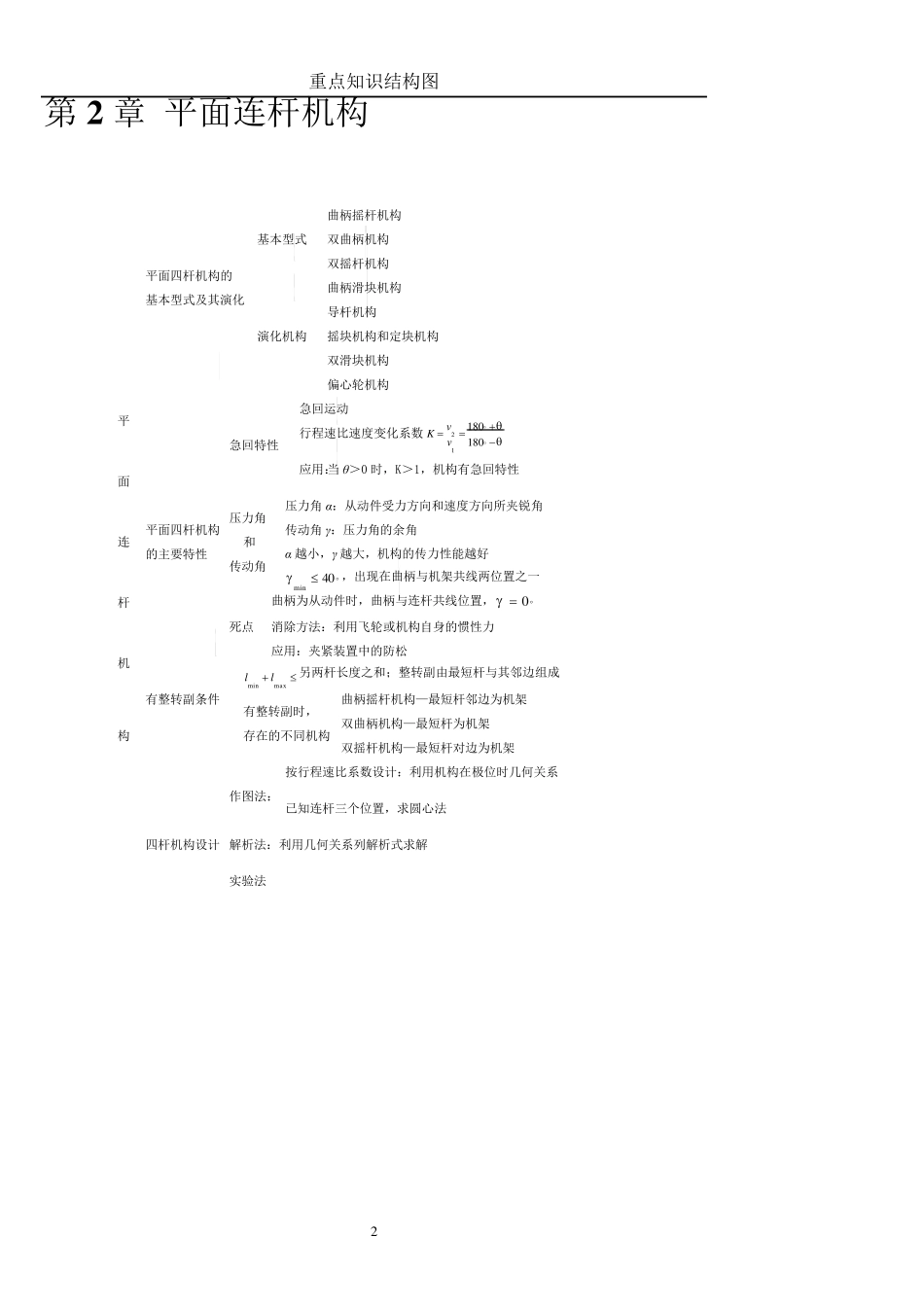
重点知识结构图 1 第1 章 平面机构的自由度和速度分析 平面机构的自由度和速度分析组成机构自由度的计算构件运动副机构运动简图运动副、构件、常用机构表达方法定义平面机构自由度的计算:机构具有确定运动的条件:自由度等于原动件数固定构件(机架)低副从动件原动件(主动件)高副移动副回转副机构运动简图绘制hlPPnF23计算自由度应注意的事项局部自由度:滚子绕其中心的转动正确计算运动副的数量 (复合铰链等)虚约束存在的几种情况平面机构的速度分析:速度瞬心法瞬心机构瞬心数瞬心位置的确定机构的速度分析相对瞬心绝对瞬心2/)1(NNK两构件不直接连接:三心定理两构件直接以运动副连接求构件的角速度和速度求两构件的角速度之比 重 点 知 识 结 构 图 2 第 2 章 平 面 连 杆 机 构 曲 柄 摇 杆 机 构 曲 柄 滑 块 机 构 演 化 机 构 杆 机 平 面 四 杆 机 构 的 基 本 型 式 按 行 程 速 比 系 数 设 计 : 利 用 机 构 在 极 位 时 几 何 关 系 已 知 连 杆 三 个 位 置 , 求 圆 心 法 应 用 : 夹 紧 装 置 中 的 防 松 构 连 面 平 基 本 型 式 及 其 演 化 双 曲 柄 机 构 双 摇 杆 机 构 导 杆 机 构 摇 块 机 构 和 定 块 机 构 双 滑 块 机 构 偏 心 轮 机 构 平 面 四 杆 机 构 的 主 要 特 性 急 回 特 性 急 回 运 动 行 程 速 比 速 度 变 化 系 数 18018012vvK 应 用 : 当 θ> 0 时 , K> 1, 机 构 有 急 回 特 性 压 力 角 压 力 角 α: 从 动 件 受 力 方 向 和 速 度 方 向 所 夹 锐 角 传 动 角 γ: 压 力 角 的 余 角 传 动 角 α 越 小 , γ越 大 , 机 构 的 传 力