院系:控制系 姓名:刘锋 学号:M201071802 指导老师:关治洪 一、P ID 控制器的设计 1
PID 线性控制器至今在控制系统的应用中占有统治地位[3]
这是因为PID 控制器结构简单,使用方便,控制对象面广,在理论上有成熟的稳定性设计和参数整定方法,在工程应用中积累了丰富的实践经验
PID 参数的整定方法很多,主要有Ziegler-Nichols 整定法,临界比例度法,衰减曲线法
首先通过实验获取控制对象的单位阶跃响应,得到响应曲线如下: 00
91时间 s被控对象的响应曲线 图1 单位阶跃响应曲线 可以看到单位阶跃响应曲线看起来不是一条S 形的曲线,所以不能用Ziegler-Nichols 方法来整定参数[1]
考虑用临界比例度法,由于临界比例法要求系统的阶数是三阶或者三阶以上,所以不可以使用临界比例度法
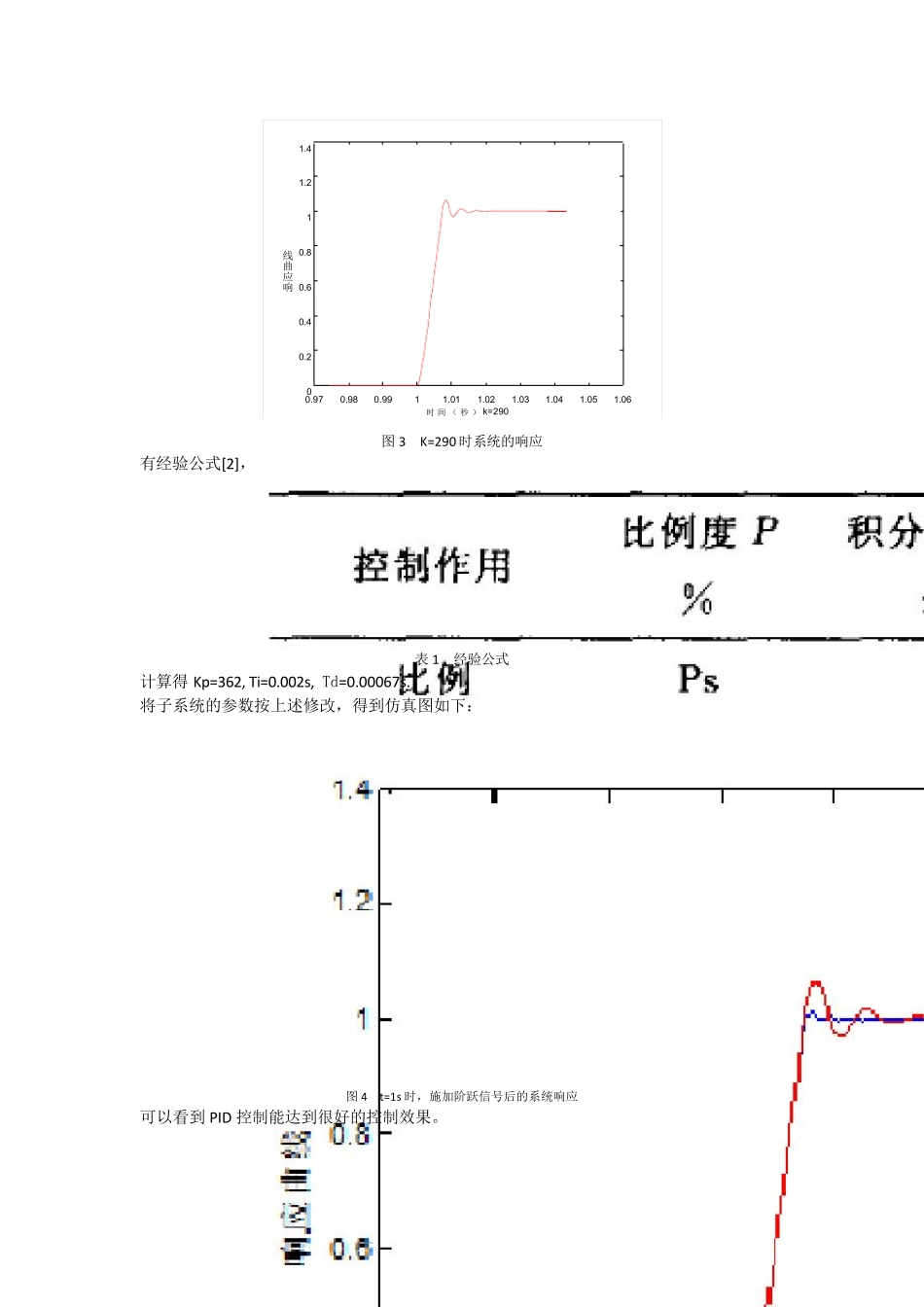
下面考虑衰减曲线法 用Simulink 搭建系统仿真图如下: 图2 断开积分微分后的阶跃响应 逐渐增大比例增益 K,观察示波器,直到响应系统的第一次超调量和第二次超调量之比为4:1时,记下此时的增益 K 值,可以得到K=290 时,比例度大约为4:1,此时比例度Ps=0
00345,Ts=0
4时 间 ( 秒 ) k=290响应曲线 图 3 K=290 时系统的响应 有经验公式[2], 表 1 经验公式 计算得 Kp=362, Ti=0
002s, Td=0
00067s
将子系统的参数按上述修改,得到仿真图如下: 图 4 t=1s 时,施加阶跃信号后的系统响应 可以看到 PID 控制能达到很好的控制效果
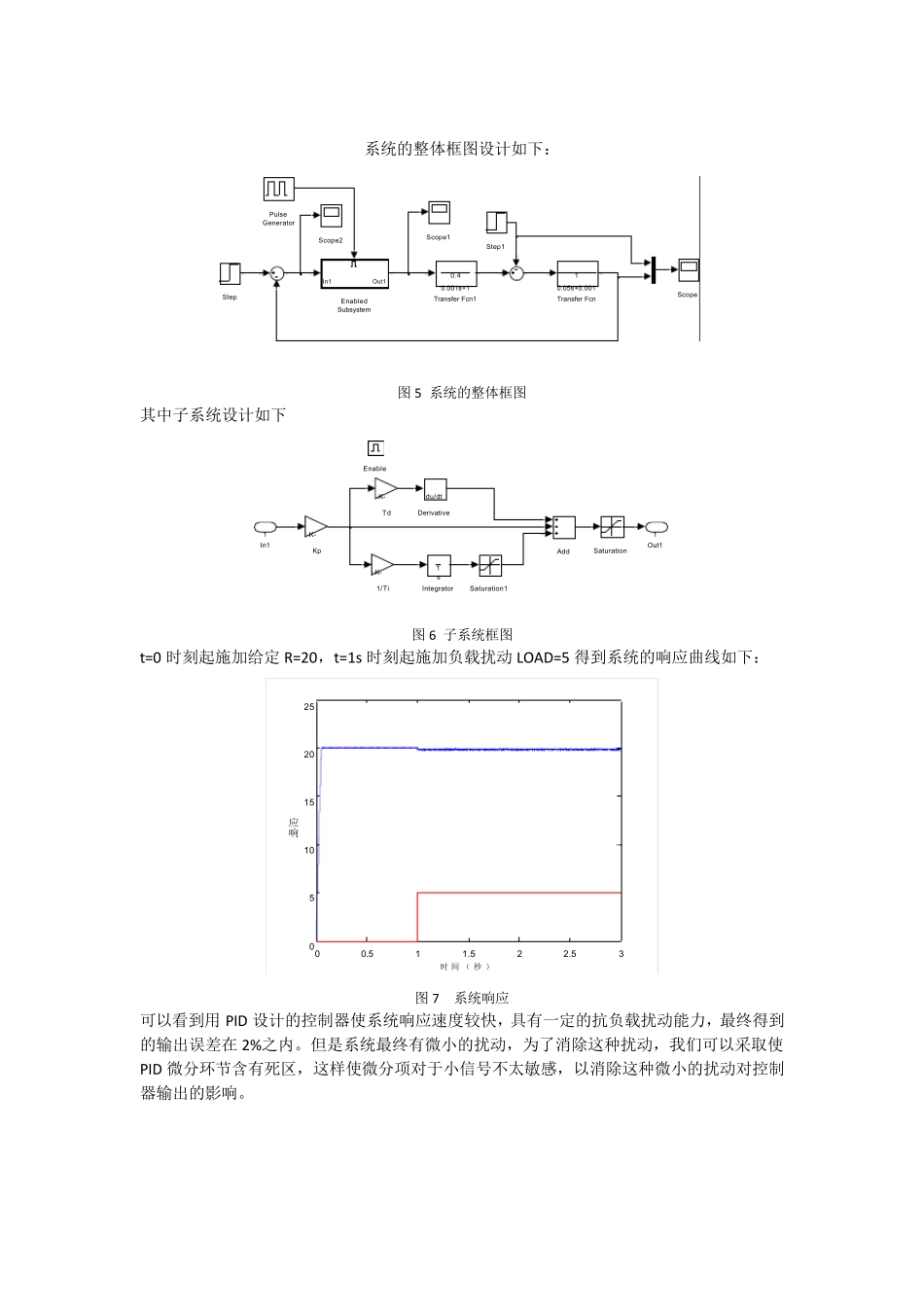
系统的整体框图设计如下:0