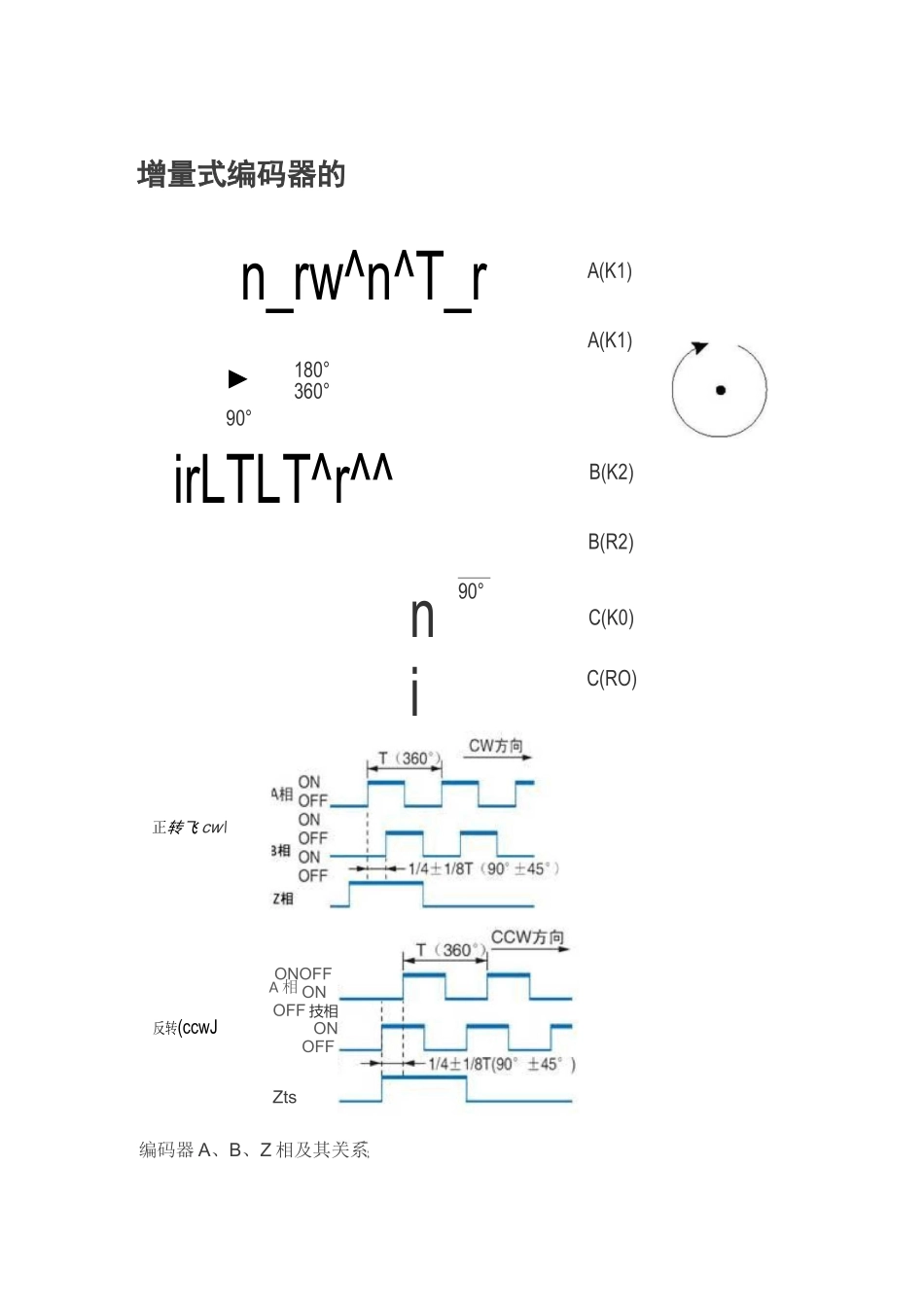
增量式编码器的n_rw^n^T_rA(K1)A(K1)►90°180°360°irLTLT^r^^B(K2)B(R2)反转(ccwJni90°C(K0)C(RO)正转飞 cw\ONOFFONOFF 技相ONOFF编码器 A、B、Z 相及其关系A 相ZtsTTL 编码器 A 相,B 相信号,Z 相信号,U 相信号,V 相信号,W 相信号,分别有什么关系
对于这个问题的回答我们从以下几个方面说明:编码器只有 A 相、B 相、Z 相信号的概念所谓 U 相、V 相、W 相是指的电机的主电源的三相交流供电,与编码器没有任何关系
“A 相、B 相、Z 相”与“U 相、V 相、W 相”是完全没有什么关系的两种概念,前者是编码器的通道输出信号;后者是交流电机的三相主回路供电
而编码器的 A 相、B 相、Z 相信号中,A、B 两个通道的信号一般是正交(即互差 90
)脉冲信号;而 Z 相是零脉冲信号
详细来说,就是——一般编码器输出信号除 A、B 两相(A、B 两通道的信号序列相位差为 90 度)夕卜,每转一圈还输出一个零位脉冲乙当主轴以顺时针方向旋转时,输出脉冲 A 通道信号位于 B 通道之前;当主轴逆时针旋转时,A 通道信号则位于 B 通道之后
从而由此判断主轴是正转还是反转
另外,编码器每旋转一周发一个脉冲,称之为零位脉冲或标识脉冲(即 Z 相信号),零位脉冲用于决定零位置或标识位置
要准确测量零位脉冲,不论旋转方向,零位脉冲均被作为两个通道的高位组合输出
由于通道之间的相位差的存在,零位脉冲仅为脉冲长度的一半
带 U、V、W 相的编码器,应该是伺服电机编码器A、B 相是两列脉冲,或正弦波、或方波,两者的相位相差 90 度,因此既可以测量转速,还可以测量电机的旋转方向 Z 相是参考脉冲,每转一圈输出一个脉冲,脉冲宽度往往只占 1/4 周期,其作用是编码器自我校正用的,使得编码器在断电或