目录 一.概论 1、转速、电流双闭环调速系统的简介 2、双闭环调速系统动态结构图 3、双闭环调速系统性能优点 4、转速调节器和电流调节器的作用 5、设计原则与步骤 二.电流调节器的设计 1、反馈系数 2、确定时间常数 3、选择电流调节器结构 4、计算电流调节器参数 5、校验近似条件 6、计算调节器电阻和电容 三.转速调节器的设计 1、确定时间常数 2、选择转速调节器结构 3、计算转速调节器参数 4、校验近似条件 5、计算调节器电阻和电容 6、校验转速超调量 7、转速调节器退饱和时转速超调量的计算 四.分析总结 一、概论 1、转速、电流双闭环调速系统的简介 为了实现转速和电流两种负反馈分别起作用,可在系统中设置两个调节器,分别调节转速和电流,即分别引入转速负反馈和电流负反馈
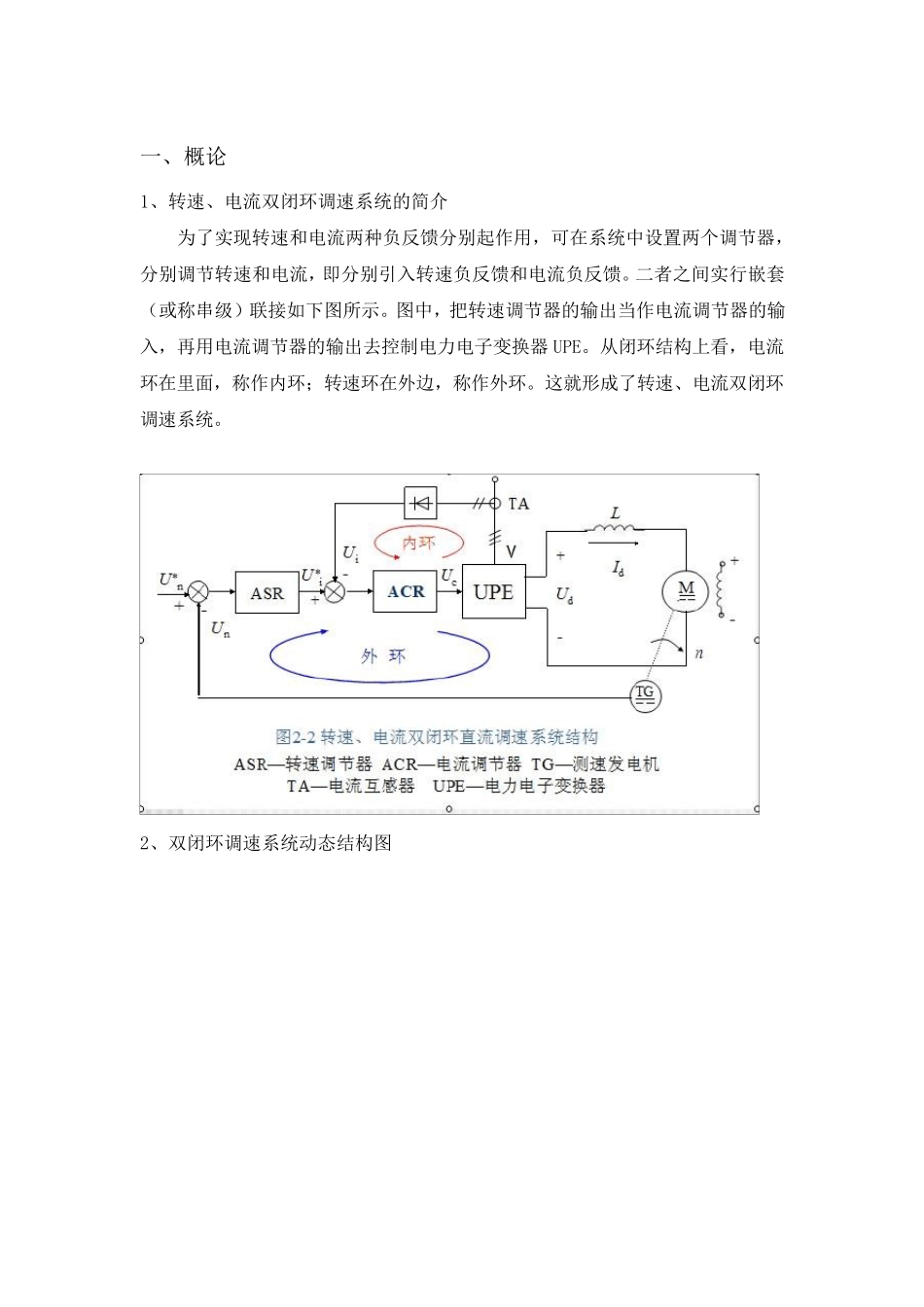
二者之间实行嵌套(或称串级)联接如下图所示
图中,把转速调节器的输出当作电流调节器的输入,再用电流调节器的输出去控制电力电子变换器 UPE
从闭环结构上看,电流环在里面,称作内环;转速环在外边,称作外环
这就形成了转速、电流双闭环调速系统
2、双闭环调速系统动态结构图 3、双闭环调速系统性能优点 ① 静特性 为了分析双闭环调速系统的静特性,必须先绘出它的稳态结构图,如下图
它可以很方便地根据上图的原理图画出来,只要注意用带限幅的输出特性表示PI 调节器就可以了
分析静特性的关键是掌握这样的 PI 调节器的稳态特征
当调节器饱和时,输出为恒值,输入量的变化不再影响输出,除非有反向的输入信号使调节器退出饱和;换句话说,饱和的调节器暂时隔断了输入和输出间的联系,相当于使该调节环开环
当调节器不饱和时,正如 1
6 节中所阐明的那样,PI 作用使输入偏差电压在稳态时总是零
实际上,在正常运行时,电流调节器是不会达到饱和状态的
因此,对于静特性来说,只有转速调节器饱和与不饱和两种情况
双闭环直流调速系统的静