1 电动小车的电机驱动及控制探讨 一个电动小车整体的运行性能,首 先取决于它的电池系统和电机驱动系统
电动小车的驱动系统一般由控制器、功率变换器及电动机三个主要部分组成
电动小车的驱动不但要求电机驱动系统 具有高转矩重量比、宽调速范围、高可靠 性,而且电机的转矩-转速特性受电源功 率的影响,这就要求驱动具有尽可能宽 的高效率区
我们所使用的电机一般为 直流电机,主要用到永磁直流电机、伺服 电机及步进电机三种
直流电机的控制 很简单,性能出众,直流电源也容易实 现
本文即主要介绍这种直流电机的驱 动及控制
1.H 型桥式驱动电路 直流电机驱动电路使用最广泛的就 是 H 型全桥式电路,这种驱动电路可以 很方便实现直流电机的四象限运行,分 别对应正转、正转制动、反转、反转制动
它的基本原理图如图1 所示
全桥式驱动电路的4 只开关管都工 作在斩波状态,S1、S2 为一组,S3、S4 为另一组,两组的状态互补,一组导通则 另一组必须关断
当 S1、S2 导通时,S3、 S4 关断,电机两端加正向电压,可以实 现电机的正转或反转制动;当 S3、S4 导 通时,S1、S2 关断,电机两端为反向电 压,电机反转或正转制动
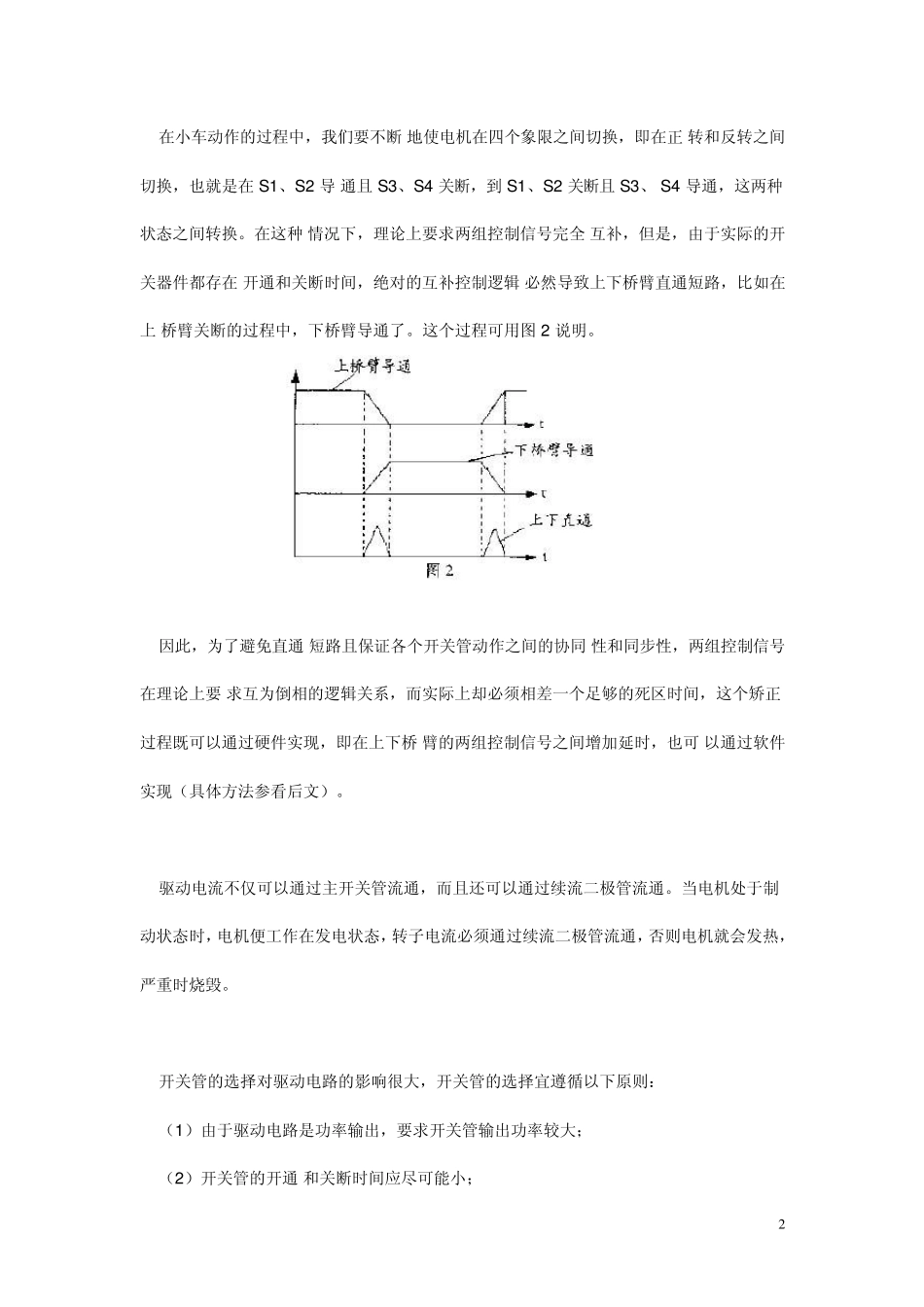
2 在小车动作的过程中,我们要不断 地使电机在四个象限之间切换,即在正 转和反转之间切换,也就是在S1、S2 导 通且 S3、S4 关断,到 S1、S2 关断且 S3、 S4 导通,这两种状态之间转换
在这种 情况下,理论上要求两组控制信号完全 互补,但是,由于实际的开关器件都存在 开通和关断时间,绝对的互补控制逻辑 必然导致上下桥臂直通短路,比如在上 桥臂关断的过程中,下桥臂导通了
这个过程可用图 2 说明
因此,为了避免直通 短路且保证各个开关管动作之间的协同 性和同步性,两组控制信号在理论上要 求互为倒相的逻辑关系,而实际上却必须相差一个足够的死区时