直线滚动导轨副的选择程序及寿命分析 滚动直线导轨副实际使用大约有20 年,作为一种新型的滚动功能部件,它已被广泛应用于精密仪器、数控机床等方面
对滚动直线导轨副最重要的是要了解其负荷性能,如果载荷分布状态知道,就可以估算滚动直线导轨副的静动负荷能力、运行寿命和可靠性;同时,当导轨副系统在现场安装组合时,导轨副许容安装误差、系统的精度寿命状况以及在此条件下的使用寿命及可靠性可以预测,并且可以判定导轨副系统所需的驱动力、作为设计滚珠丝杠等驱动系统的设计依据
1 导轨副载荷计算 1
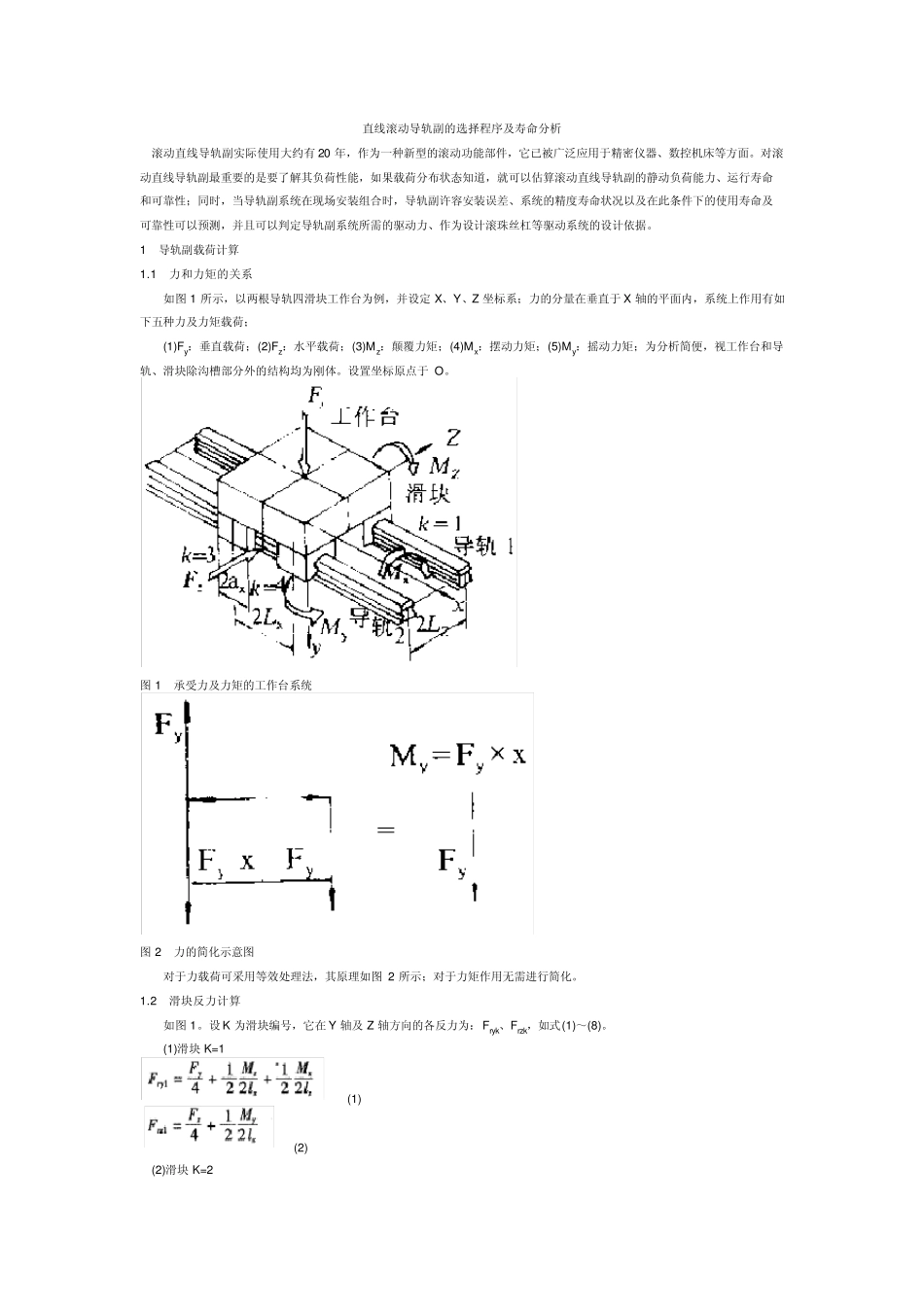
1 力和力矩的关系 如图 1 所示,以两根导轨四滑块工作台为例,并设定 X、Y、Z 坐标系;力的分量在垂直于X 轴的平面内,系统上作用有如下五种力及力矩载荷; (1)Fy:垂直载荷;(2)Fz:水平载荷;(3)Mz:颠覆力矩;(4)Mx:摆动力矩;(5)My:摇动力矩;为分析简便,视工作台和导轨、滑块除沟槽部分外的结构均为刚体
设置坐标原点于O
图 1 承受力及力矩的工作台系统 图 2 力的简化示意图 对于力载荷可采用等效处理法,其原理如图 2 所示;对于力矩作用无需进行简化
2 滑块反力计算 如图 1
设 K 为滑块编号,它在 Y 轴及Z 轴方向的各反力为:Fryk、Frzk,如式(1)~(8)
(1)滑块 K=1 (1) (2) (2)滑块 K=2 (3) (4) (3)滑块K=3 (5) (6) (4)滑块K=4 (7) (8) 1
3 工作台的位移计算 工作台的位移形式如图3 所示
对应于力和力矩的作用可分为以下五种分量,即: (1)α1=Y 轴方向的位移;(2)α2=颠覆角;(3)α3=摆动角;(4)α4=Z 轴方向的位移;(5)α2=摇动角;工作台上任意点M(x 、y 、z )在 Y 轴及 Z 轴方向的位移设为δy、δz,可用下式表示: δy=α1+α2x+α3z (9) δz