(4)、转矩方程按照机电能量转换原理,可求出电磁转矩 Te 的表达式如式(2-17)所示
此式证明从略
(2-17) 这里需要说明的是,式(2-17)是在磁路为线性、磁动势在空间按正弦分布的假定条件下得出的,但对定、转子电流的波形未作任何假定,式中的 i 都是瞬时值
因此,这个电磁转矩公式同样适用于由典雅型变频器供电的三相异步电机调速系统
(5)、三相异步电动机的数学模型 将前述式(2-14)、式(2-16)归纳起来,便构成在恒转矩负载下三相异步电动机的多变量非线性数学模型如下: … … … … … … … … … … … … … … … … … … …
(2-18) 上式中可按式(2-17)展开
坐标变换和变换矩阵 虽然,在上节中已经推导出异步电动机的动态数学模型,但是,要分析和求解这组非线性方程是十分困难的,即使要画出很清晰的结构图也非易事
通常须采用坐标变换的方法
使变换后的数学模型变得简单一些
1 坐标变换的原则和基本思路 从上节分析异步电动机数学模型的过程中可以看出,这个数学模型之所以复杂,关键是因为有一个复杂的电感矩阵,以及三相异步电机电磁关系的强耦合和非线性,故要简化数学模型,一是从简化磁链的关系着手;二是设法使三相异步电动机复杂的电磁关系解耦
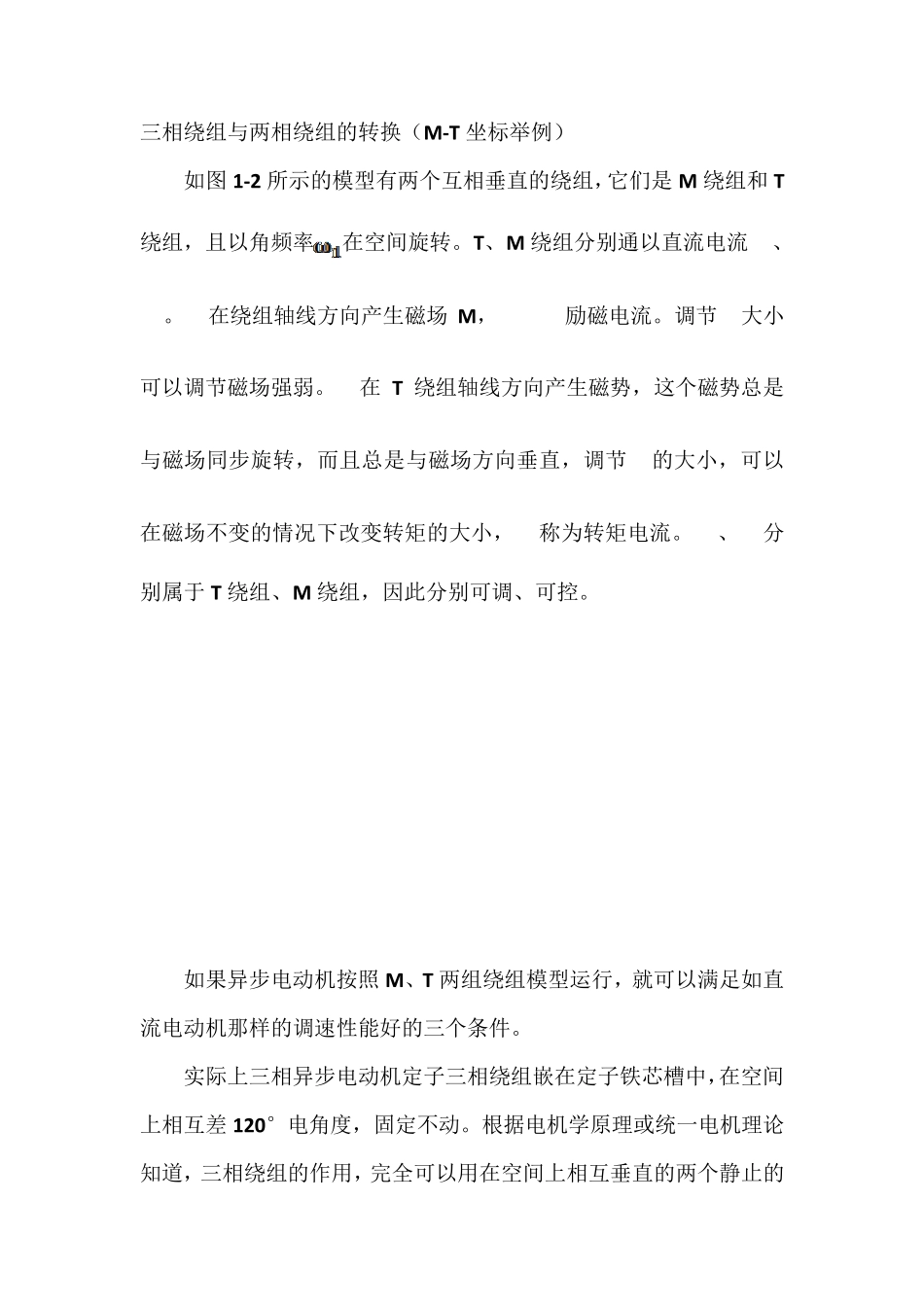
比较容易想到的方法就是前面所讲到过的设法为异步电动机创造类似于直流电动机所具有的三个条件,即将交流电机的物理模型(见图2 -3 )等效地变换成类似直流电机的模式(见下页图1 -2 ),如能这样,三相异步电动机的分析和控制问题就可以大为化简,并且,完全可以沿用直流电机调速系统的控制思路对三相异步电动机进行控制,进而得到与支流调速系统相媲美的调速性能
坐标变换正是为了这个目的而提出的一种方法
在这里,不同电机模型在变换前后彼此等效的原则是,在不同坐标中它们所产生的