第1章 控制系统的基本概念 1
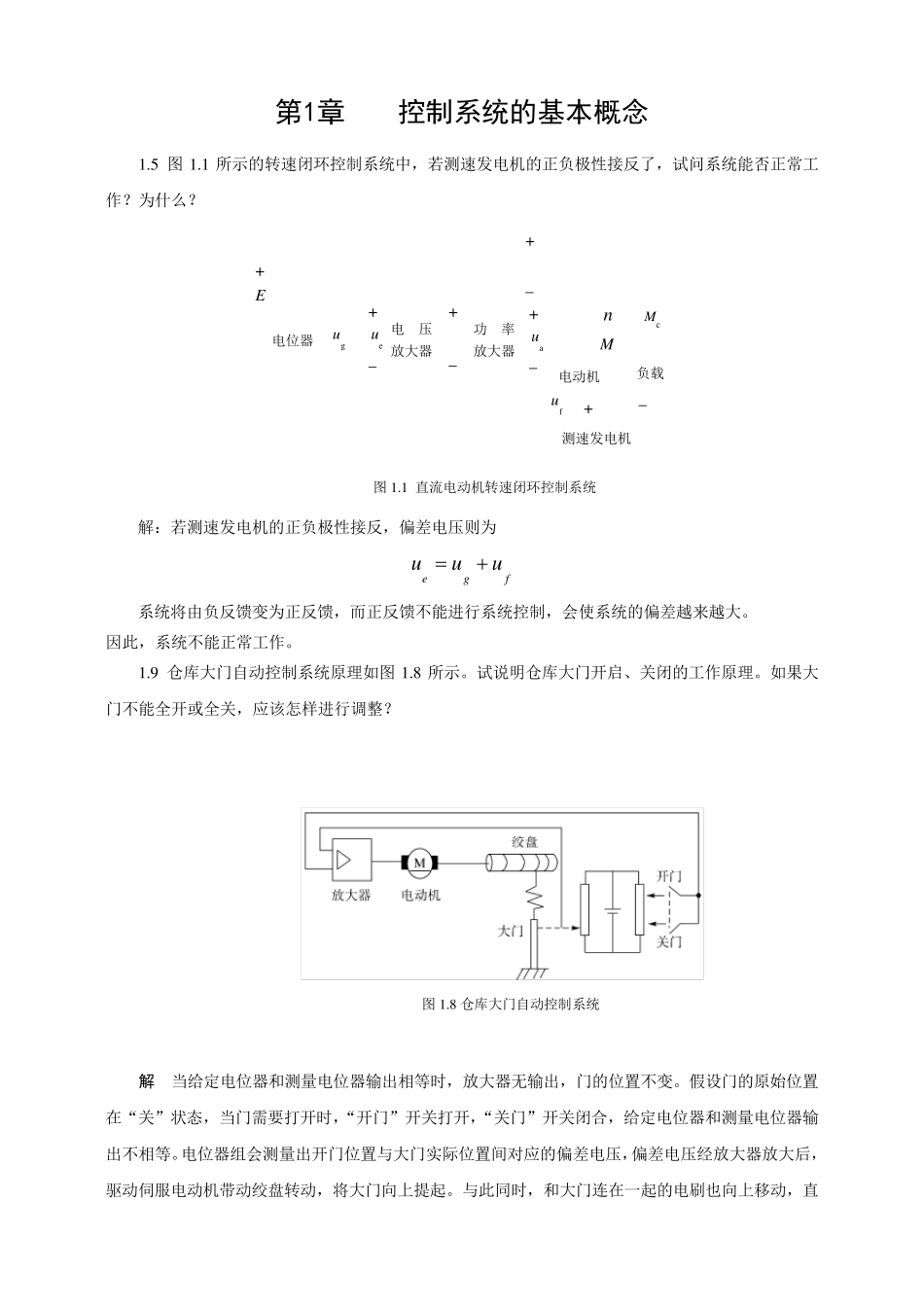
1 所示的转速闭环控制系统中,若测速发电机的正负极性接反了,试问系统能否正常工作
1 直流电动机转速闭环控制系统 电 压 放大器 功 率 放大器 Mc 负载 nM电动机 + _ + au _ + _ gu + E 电位器 测速发电机 + _ fu + eu _ 解:若测速发电机的正负极性接反,偏差电压则为 egfuuu 系统将由负反馈变为正反馈,而正反馈不能进行系统控制,会使系统的偏差越来越大
因此,系统不能正常工作
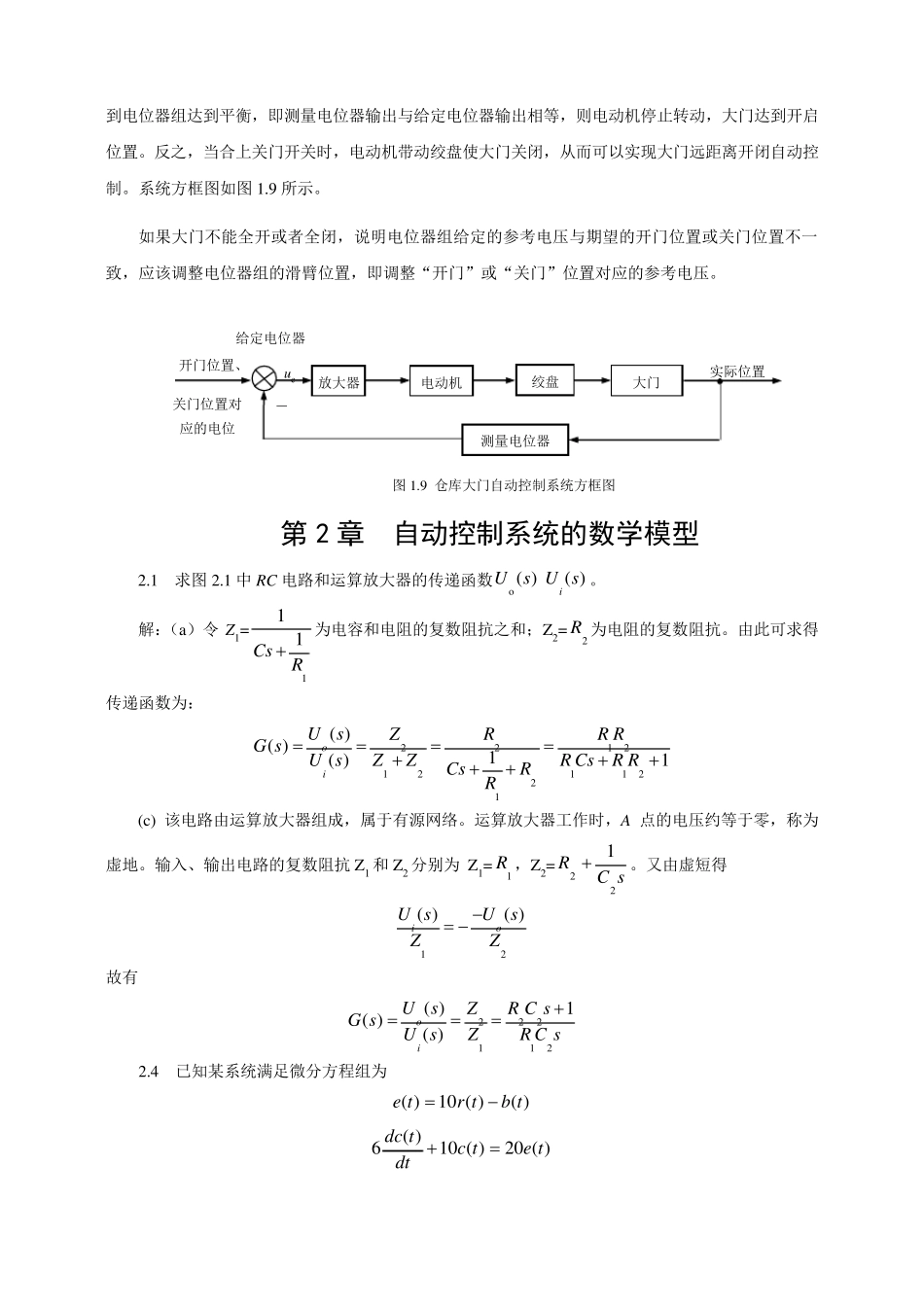
9 仓库大门自动控制系统原理如图1
试说明仓库大门开启、关闭的工作原理
如果大门不能全开或全关,应该怎样进行调整
解 当给定电位器和测量电位器输出相等时,放大器无输出,门的位置不变
假设门的原始位置在“关”状态,当门需要打开时,“开门”开关打开,“关门”开关闭合,给定电位器和测量电位器输出不相等
电位器组会测量出开门位置与大门实际位置间对应的偏差电压,偏差电压经放大器放大后,驱动伺服电动机带动绞盘转动,将大门向上提起
与此同时,和大门连在一起的电刷也向上移动,直图1
8 仓库大门自动控制系统 图1
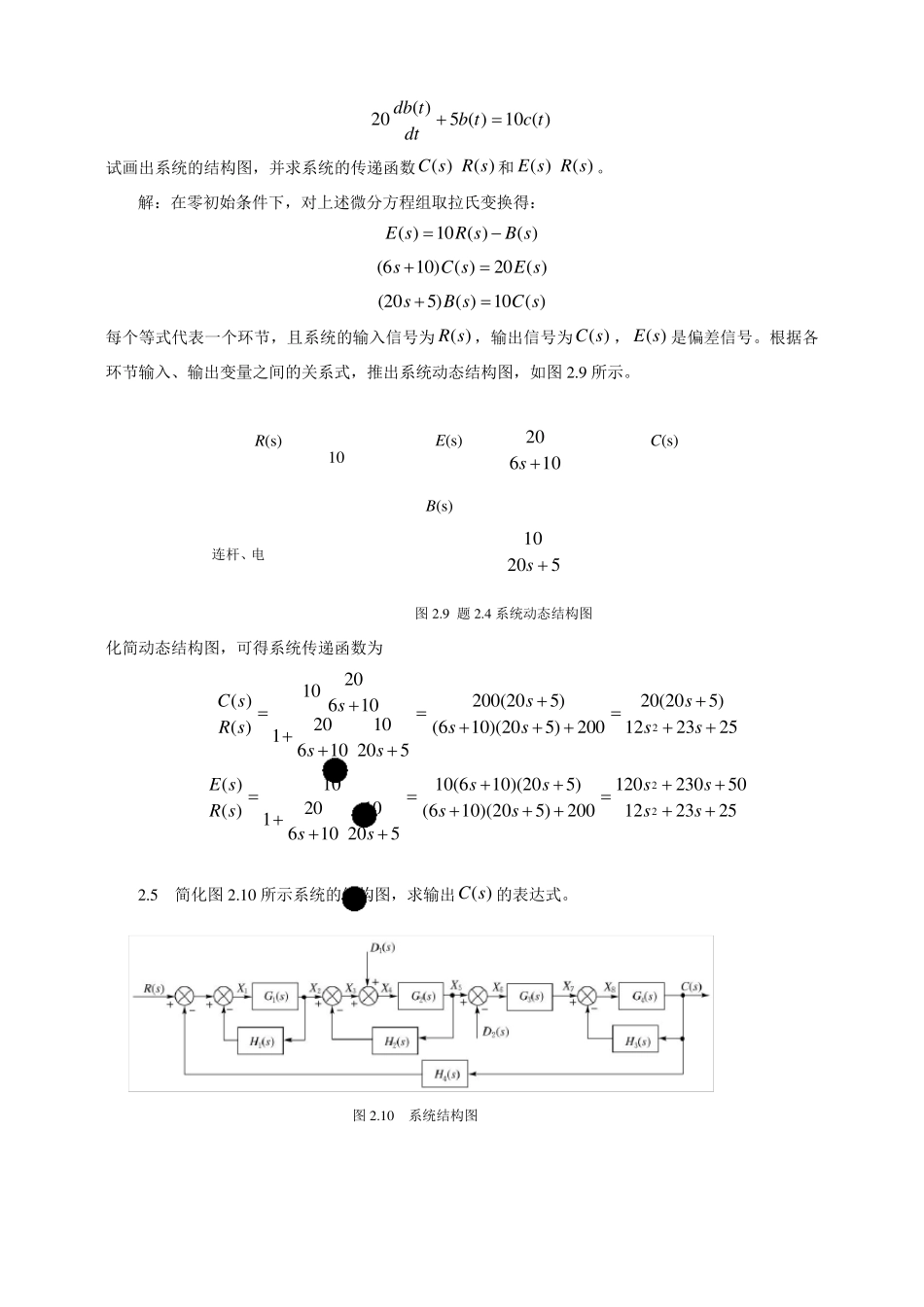
9 仓库大门自动控制系统方框图 关门位置对应的电位 开门位置、 放大器 绞盘 - u e 实际位置 电动机 大门 给定电位器 测量电位器 到电位器组达到平衡,即测量电位器输出与给定电位器输出相等,则电动机停止转动,大门达到开启位置
反之,当合上关门开关时,电动机带动绞盘使大门关闭,从而可以实现大门远距离开闭自动控制
系统方框图如图1
如果大门不能全开或者全闭,说明电位器组给定的参考电压与期望的开门位置或关门位置不一致,应该调整电位器组的滑臂位置,即调整“开门”或“关门”位置对应的参考电压
第2 章 自动控制系统的数学模型 2
1 中 RC 电路和运算放大器的传