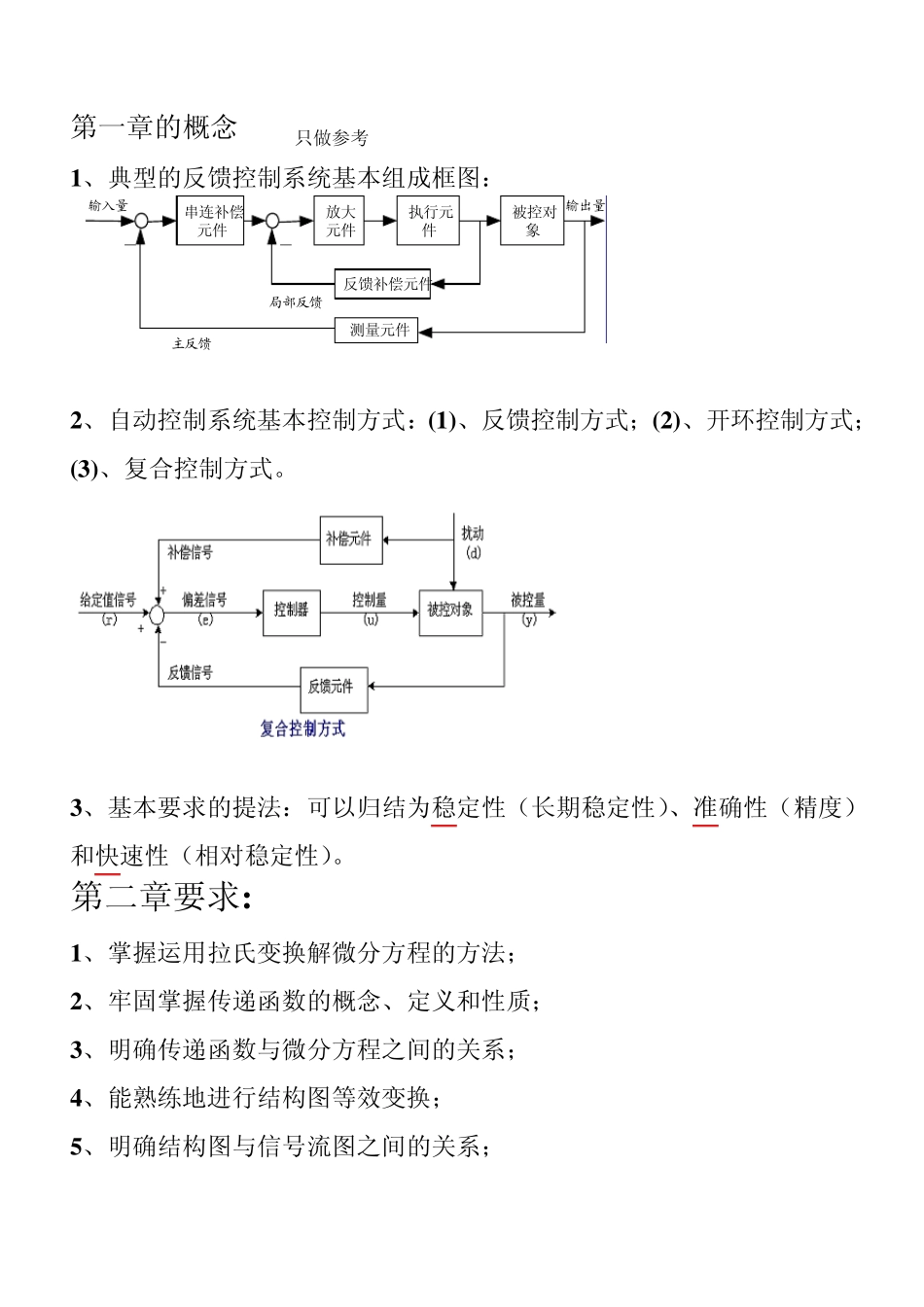
第一章的概念 只做参考 1、典型的反馈控制系统基本组成框图: 2、自动控制系统基本控制方式:(1)、反馈控制方式;(2)、开环控制方式;(3)、复合控制方式
3、基本要求的提法:可以归结为稳定性(长期稳定性)、准确性(精度)和快速性(相对稳定性)
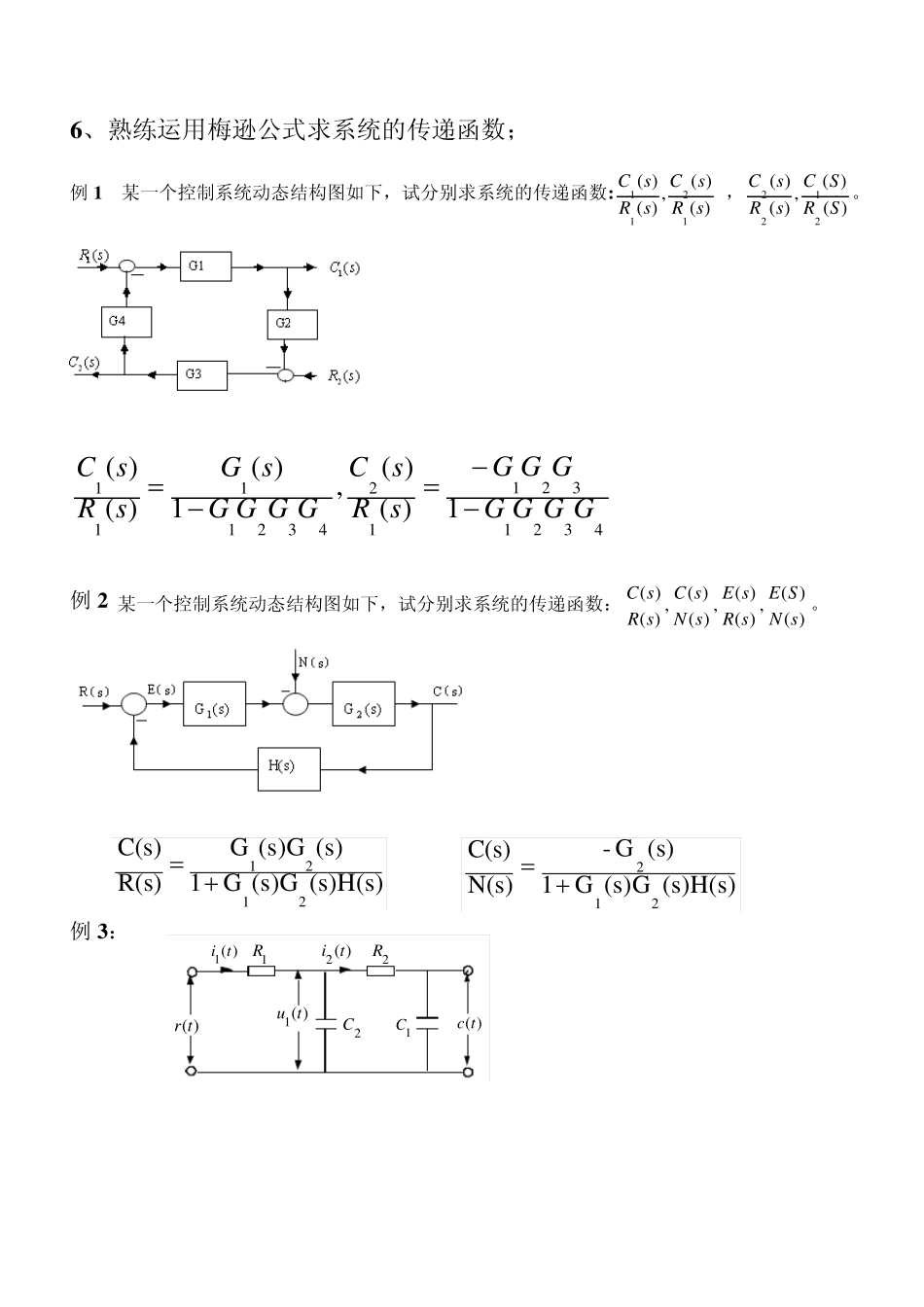
第二章要求: 1、掌握运用拉氏变换解微分方程的方法; 2、牢固掌握传递函数的概念、定义和性质; 3、明确传递函数与微分方程之间的关系; 4、能熟练地进行结构图等效变换; 5、明确结构图与信号流图之间的关系; 串连补偿元件放大元件执行元件被控对象反馈补偿元件测量元件输出量主反馈局部反馈输入量-- 6、熟练运用梅逊公式求系统的传递函数; 例 1 某一个控制系统动态结构图如下,试分别求系统的传递函数:)()(,)()(1211sRsCsRsC ,)()(,)()(2122SRSCsRsC
43213211243211111)()(,1)()()(GGGGGGGsRsCGGGGsGsRsC 例 2 某一个控制系统动态结构图如下,试分别求系统的传递函数:)()(,)()(,)()(,)()(sNSEsRsEsNsCsRsC
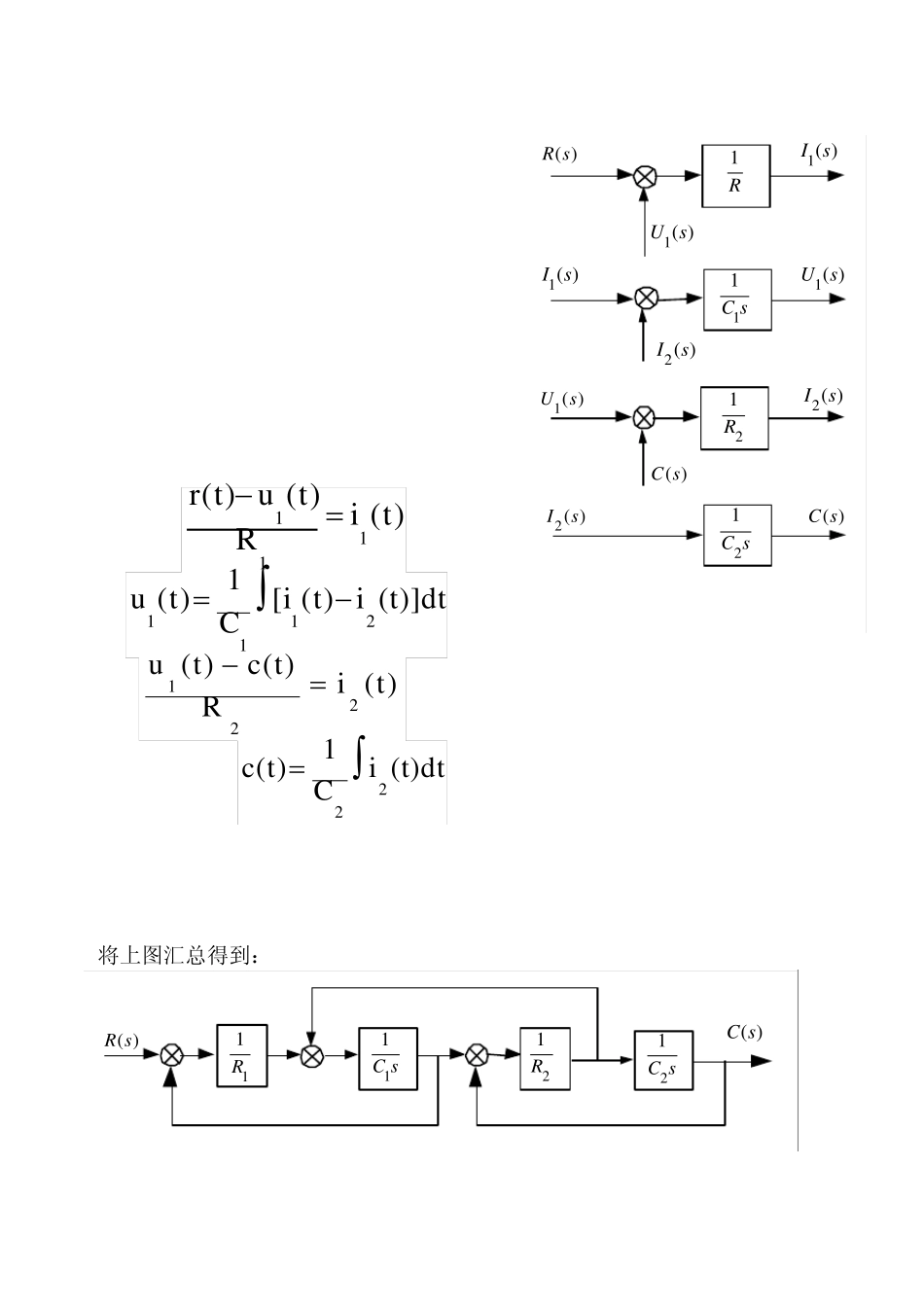
例 3: 1( )i t2( )it1( )ut( )c t( )r t1R2R1C2C(s)H(s)(s)GG1(s)(s)GGR(s)C(s)2121(s)H(s)(s)GG1(s)G-N(s)C(s)212 将上图汇总得到: +_+_+_Ka11C s21C s21R1R( )R s( )C s1( )U s1( )Us1( )U s1( )I s1( )I s2( )Is2( )Is2( )Is( )C s(b)(t)iR(t)ur(t)111(t)]dti(t)[iC1(t)u2111(t)iRc(t)(t)u221(t)dtiC1c(t)22+_+_+-11C s2