1 一、填空题(每空 1 分,共 15 分) 1 、反馈控制又称偏差控制,其控制作用是通过 给定值 与反馈量的差值进行的
2 、复合控制有两种基本形式:即按 输入 的前馈复合控制和按 扰动 的前馈复合控制
3 、两个传递函数分别为 G1(s)与 G2(s)的环节,以并联方式连接,其等效传递函数为( )G s ,则 G(s)为 G1(s)+G2(s)(用 G1(s)与 G2(s) 表示)
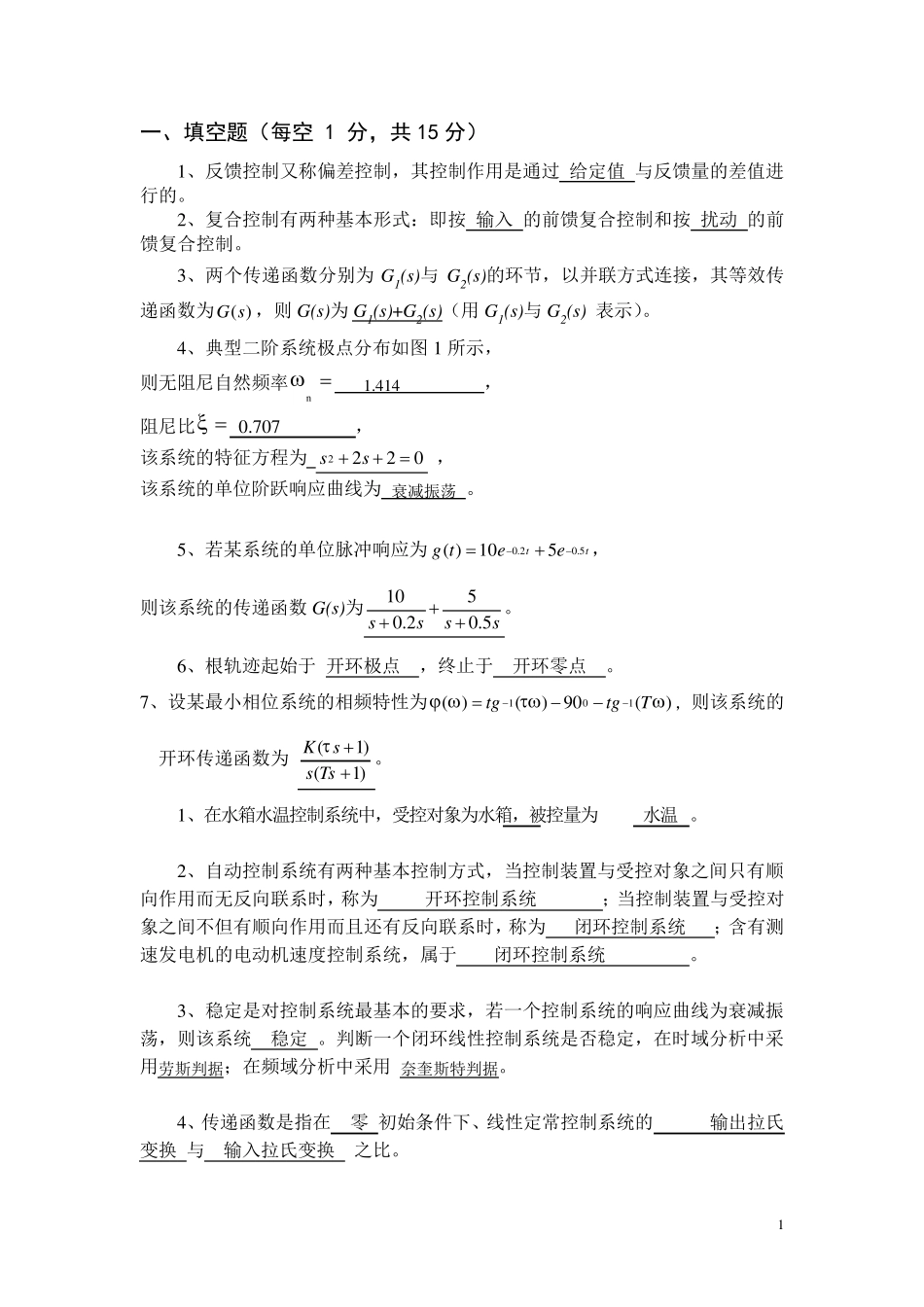
4 、典型二阶系统极点分布如图 1 所示, 则无阻尼自然频率n 1
4 1 4 , 阻尼比 0
7 0 7 , 该系统的特征方程为 2220ss , 该系统的单位阶跃响应曲线为 衰减振荡
5 、若某系统的单位脉冲响应为0
5( )1 05ttg tee, 则该系统的传递函数 G(s)为1 050
5ssss
6 、根轨迹起始于 开环极点 ,终止于 开环零点
7 、设某最小相位系统的相频特性为101( )()9 0()tgtgT ,则该系统的开环传递函数为 (1 )(1 )Kss Ts
1 、在水箱水温控制系统中,受控对象为水箱,被控量为 水温
2 、自动控制系统有两种基本控制方式,当控制装置与受控对象之间只有顺向作用而无反向联系时,称为 开环控制系统 ;当控制装置与受控对象之间不但有顺向作用而且还有反向联系时,称为 闭环控制系统 ;含有测速发电机的电动机速度控制系统,属于 闭环控制系统
3 、稳定是对控制系统最基本的要求,若一个控制系统的响应曲线为衰减振荡,则该系统 稳定
判断一个闭环线性控制系统是否稳定,在时域 分析 中采用劳 斯 判据 ;在频域 分析 中采 用 奈 奎 斯 特判据
4 、传递函数是指 在 零 初 始条 件 下 、线性定常 控制系统的 输出 拉 氏变 换 与 输入