汽车等高性能检测分析 随着人们对汽车技术水平要求的提高,车辆线下检测项目越来越多,汽车检测技术也在不断的进展成熟,比方汽车综合性能检测和环保检测
而由零部件差异、装配问题导致的汽车车身高度差异,因存在汽车侧倾、侧翻或载荷支配不均的风险,威胁车主人身安全,在许多高端汽车制造企业中,已列为必检项
常见的检测手法如人工使用卷尺或使用等高尺,受环境及人为因素的影响不方便也不精确;而行业内大多数的商量主要集中在非接触式手动检测仪方面
如文献[1]可 360°自由旋转的激光器+丝杠螺母螺旋副组成的高度调整装置;文献[2]可水平旋转的摄像头+滚轮升降滑套装置;文献[3]在文献[1]的基础上进行了误差分析及标定方法,提升了检测精度
以上检测方法均需人工操作手动检测,单次检测节拍约为 75S,如需测量车辆前后端的高度差,操作人员需不断往返,不符合总装厂流水线式的生产节奏,极大的制约了主机厂的生产节拍
本文创新性的提出了一种基于双目成像的视觉测量方案,可在非接触车身的状况下实现汽车整车高差的全自动化检测,测量精准,方便快捷
1 测量原理 1
1 检测原理
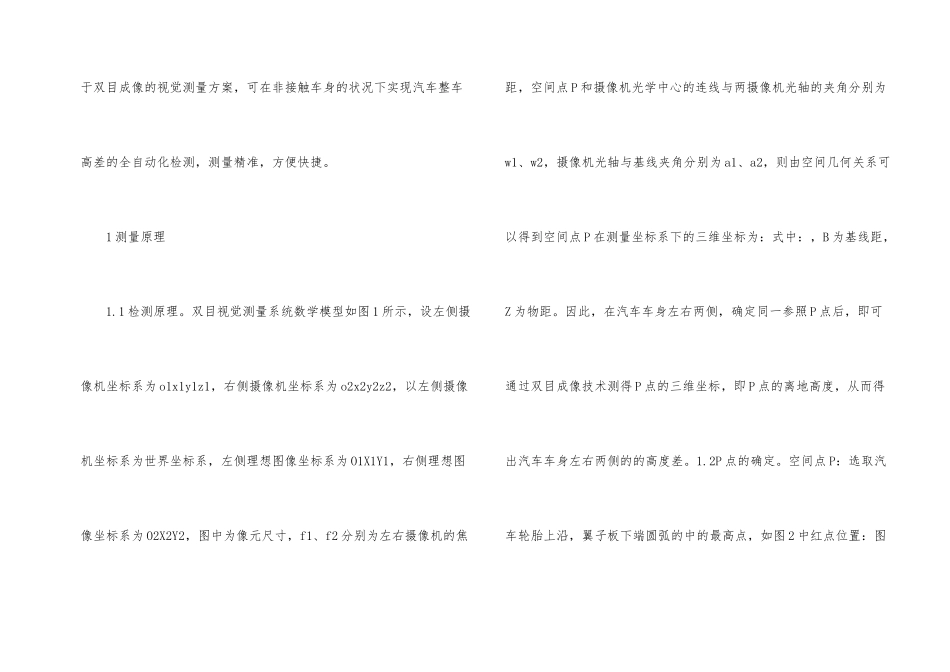
双目视觉测量系统数学模型如图 1 所示,设左侧摄像机坐标系为 o1x1y1z1,右侧摄像机坐标系为 o2x2y2z2,以左侧摄像机坐标系为世界坐标系,左侧理想图像坐标系为 O1X1Y1,右侧理想图像坐标系为 O2X2Y2,图中为像元尺寸,f1、f2 分别为左右摄像机的焦距,空间点 P 和摄像机光学中心的连线与两摄像机光轴的夹角分别为w1、w2,摄像机光轴与基线夹角分别为 a1、a2,则由空间几何关系可以得到空间点 P 在测量坐标系下的三维坐标为:式中:,B 为基线距,Z 为物距
因此,在汽车车身左右两侧,确定同一参照 P 点后,即可通过双目成像技术测得 P 点的三维坐标,即 P 点的离地高度,从而得出汽车车身左右两侧的的高度差