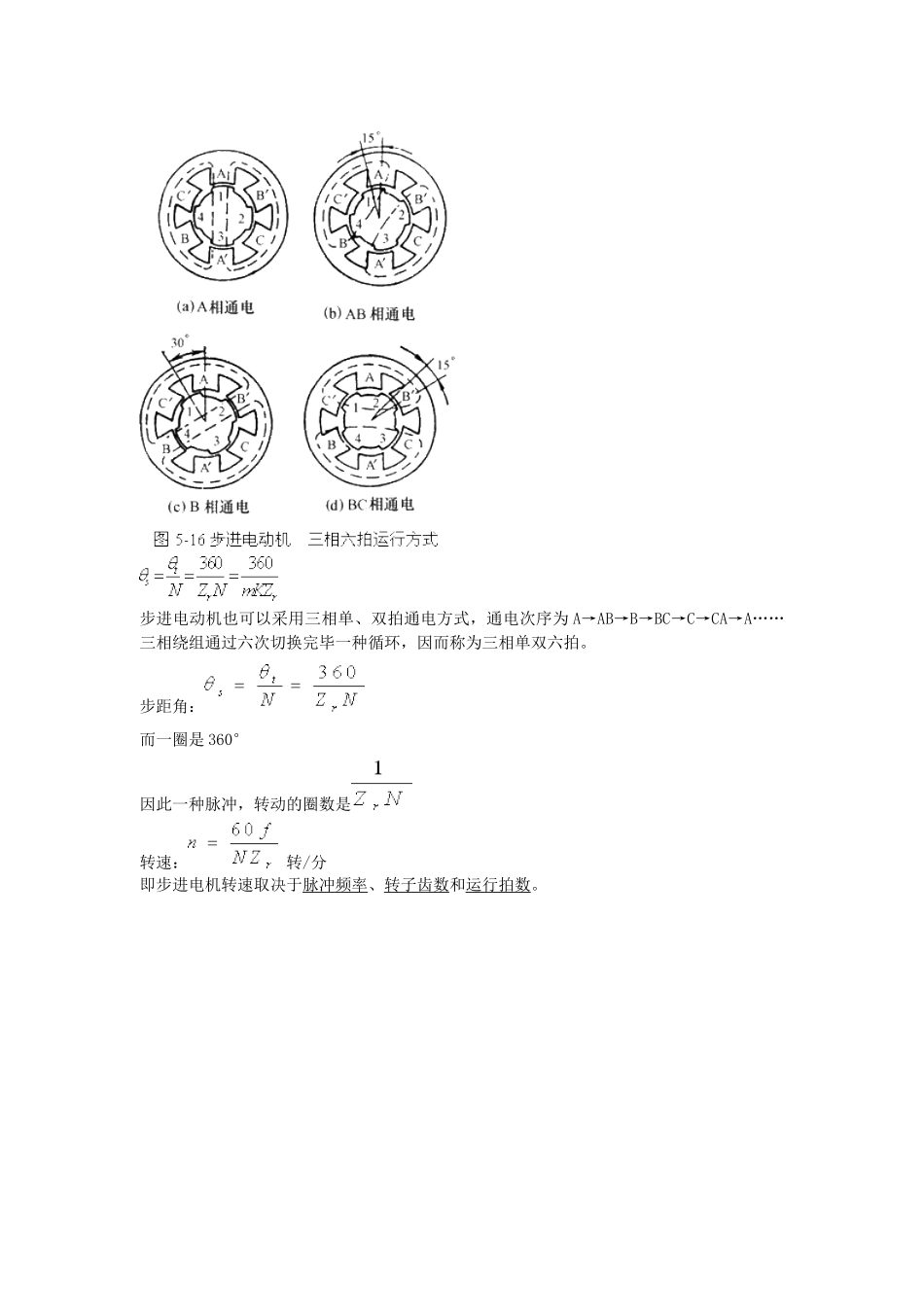
步进电动机也可以采用三相单、双拍通电方式,通电次序为 A→AB→B→BC→C→CA→A……三相绕组通过六次切换完毕一种循环,因而称为三相单双六拍
步距角:而一圈是 360°因此一种脉冲,转动的圈数是转速: 转/分即步进电机转速取决于脉冲频率、转子齿数和运行拍数
【提醒】步进电动机的转子齿数多,齿距角就小,步距角也就越小,位置精确度就越高
转子齿数多,步距角就小
除三相反应式步进电动机外,尚有四相、五相、六相反应式步进电动机
永磁感应子式步进电动机定子转子的齿距一般相似
由于在磁路中具有永久磁钢,因此,永磁感应子式步进电动机的定子绕组断电后,仍有一定的定位转矩
步进电动机的重要性能指标
步进电动机的重要性能指标有:步距精度空载时,以单脉冲输入,步进电动机的实际步距角与理论步距角之差称为静态步距角误差,以偏差的角度或相对百分数来衡量
我国生产的步进电动机的步距精度一般在±10~±30 分的范围,有些可达±2~±5 分
最大静转距转子处在静止状态时,能与最大负载转矩相平衡的电磁转矩称为步进电动机的最大静转矩
它是衡量步进电动机带负载能力的重要指标
起动频率使步进电动机可以由静止定位状态不失步地起动,并进入正常运行的控制脉冲最高频率,称为起动频率
在电动机空载状况下,称为空载起动频率
在有负载状况下,不失步起动所容许的最高频率将大大减少
持续运行频率步进电动机起动后,其转速将跟随控制脉冲频率持续上升而不失步的控制脉冲的最高频率,称为持续运行频率的最高工作频率
步进电动机的持续运行频率随负载的增大而下降,但步进电动机持续运行频率远高于其起动频率
(二)步进电机对驱动电源的规定(理解)1
电源的相数、电压、电流、通电方式与步进电机的规定相适应;2
满足起动频率和运行频率的规定;3
工作可靠、抗干扰能力强;4
成本低,效率高,安装和维护以便;驱动电源由环形分派器和功率驱动器构成