自动控制原理课程设计题目速度伺服控制系统设计专业 电气工程及其自动化 姓名 班级 学号 指导老师 机电工程学院2024 年 12 月目 录一 课程设计设计目的二 设计任务三 设计思想四 设计过程五 应用 simulink 进行动态仿真六 设计总结七 参考文献一、课程设计目的: 通过课程设计,在掌握自动控制理论基本原理、一般电学系统自动控制方法的基础上,用 MATLAB 实现系统的仿真与调试
二、设计任务:速度伺服控制系统设计
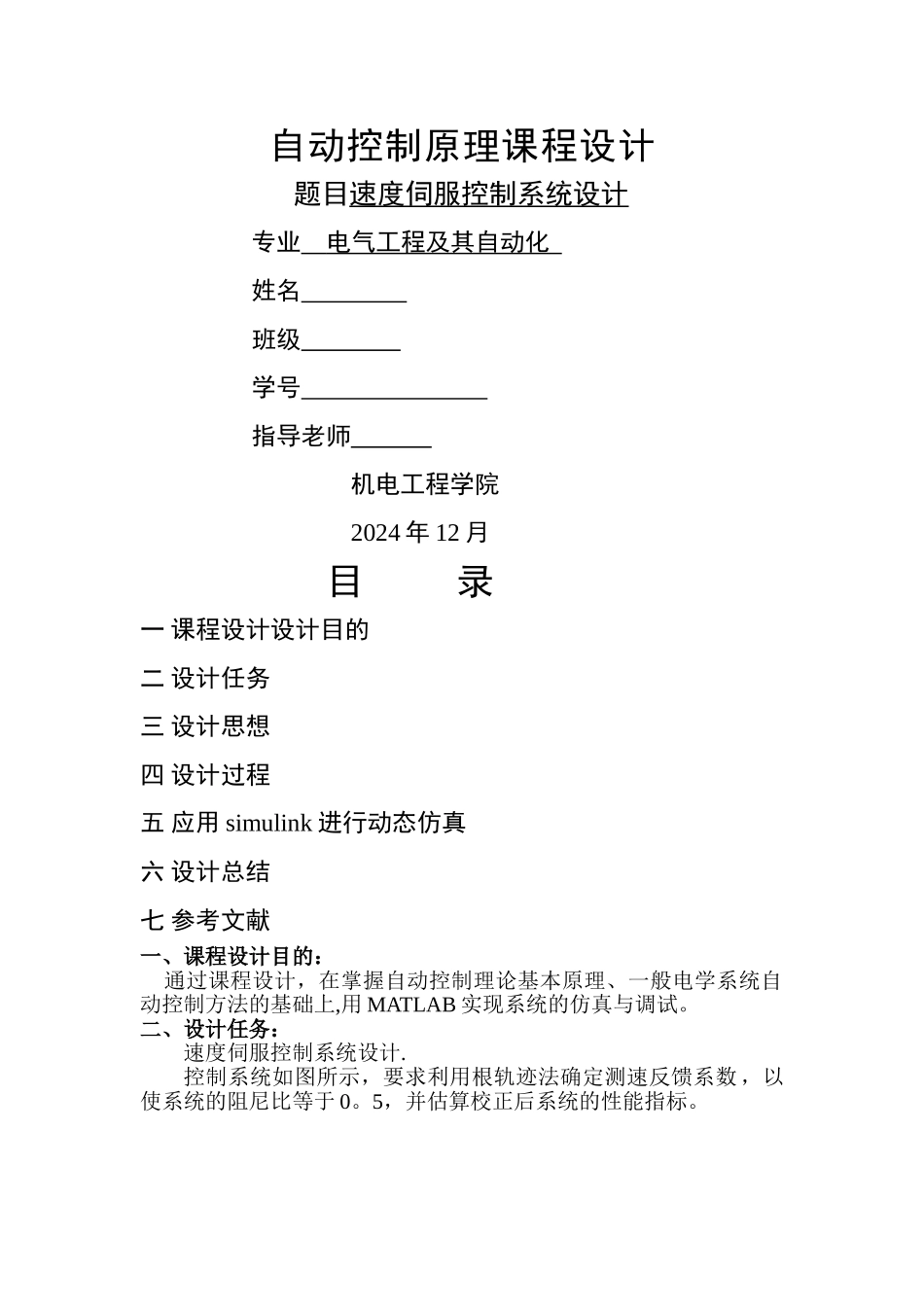
控制系统如图所示,要求利用根轨迹法确定测速反馈系数 ,以使系统的阻尼比等于 0
5,并估算校正后系统的性能指标
三、设计思想:反馈校正:在控制工程实践中,为改善控制系统的性能,除可选用串联校正方式外,常常采纳反馈校正方式
常见的有被控量的速度,加速度反馈,执行机构的输出及其速度的反馈,以及复杂系统的中间变量反馈等
反馈校正采纳局部反馈包围系统前向通道中的一部分环节以实现校正,
从控制的观点来看,采纳反馈校正不仅可以得到与串联校正同样的校正效果,而且还有许多串联校正不具备的突出优点:第一,反馈校正能有效地改变被包围环节的动态结构和参数;第二,在一定条件下,反馈校正装置的特性可以完全取代被包围环节的特性,反馈校正系数方框图从而可大大削弱这部分环节由于特性参数变化及各种干扰带给系统的不利影响
该设计应用的是微分负反馈校正:如下图所示,微分负反馈校正包围振荡环节
其闭环传递函数为试中,=+,表明微分负反馈不改变被包围环节的性质,但由于阻尼比增大,使得系统动态响应超调量减小,振荡次数减小,改善了系统的平稳性
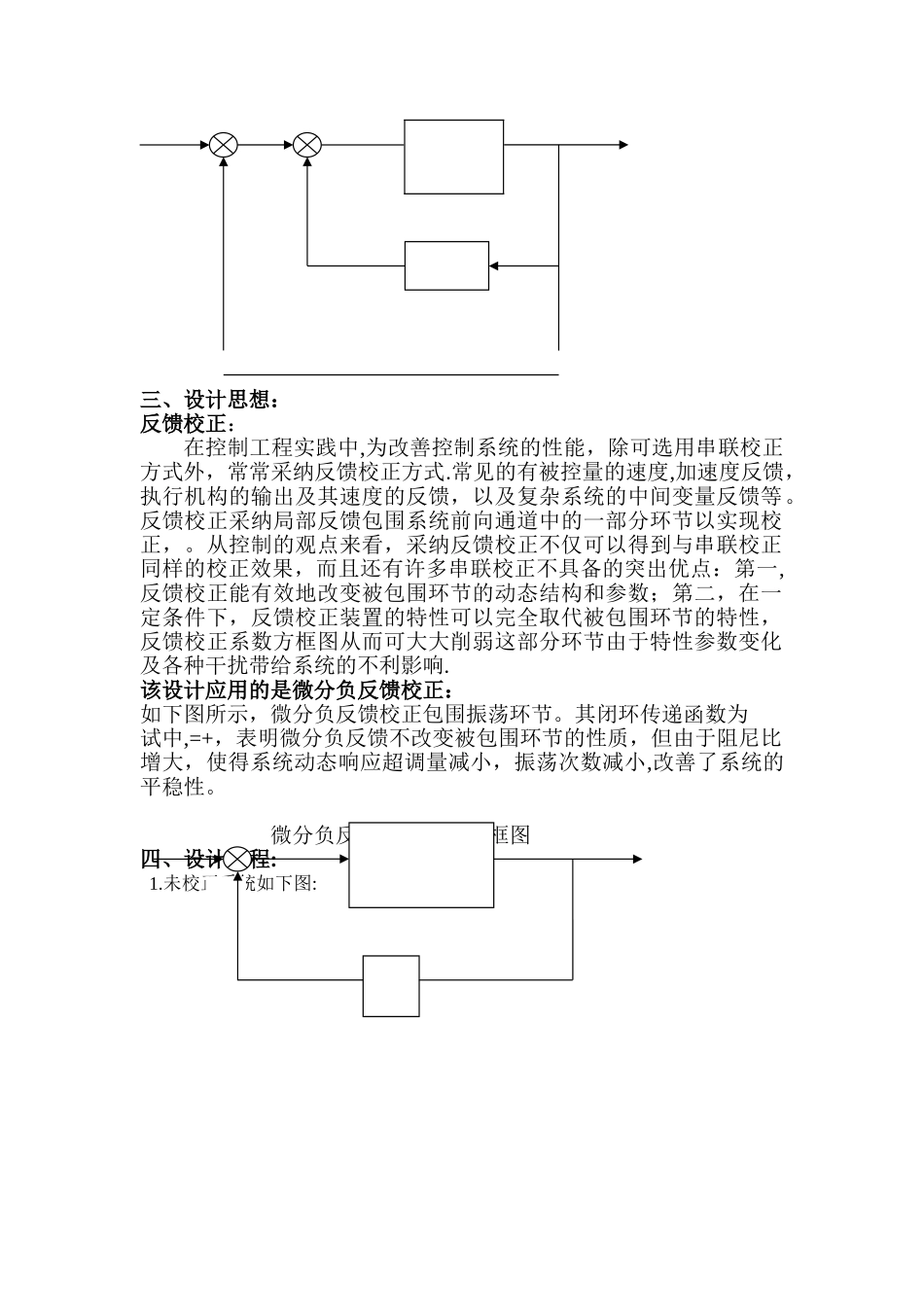
微分负反馈校正系统方框图四、设计过程:1
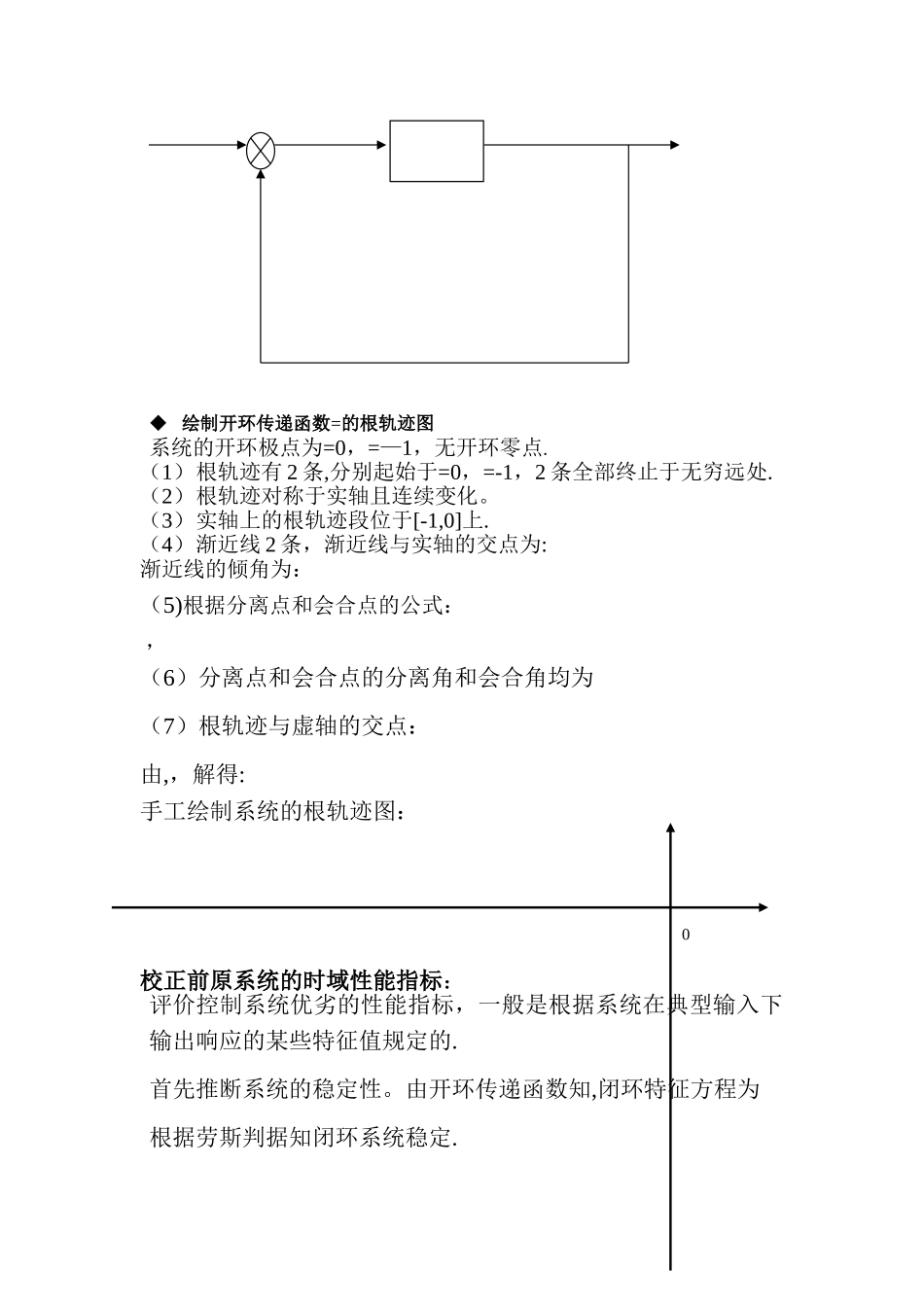
未校正系统如下图: 绘制开环传递函数=的根轨迹图系统的开环极点为=0,=—1,无开环零点
(1)根轨迹有 2 条,分别起始于=0,=-1,2 条全部终止于无穷远处
(2)根轨迹对称于实轴且连续变化
(3)实轴上的根