由于今年组委会光电管和摄像头分开竞赛
所以传感器部分我们选择了光电管,竞赛以小车的速度记成绩,为了让小车更快更稳得跑完全程,传感器的探测距离必须要远,既要有大的前瞻,普通的红外对管由于功率较小,探测距离增大时,干扰严重,所以我们自制了大功率对管,同时采纳了程序控制脉冲发光的办法,有效的降低了发热,提高了系统的稳定性
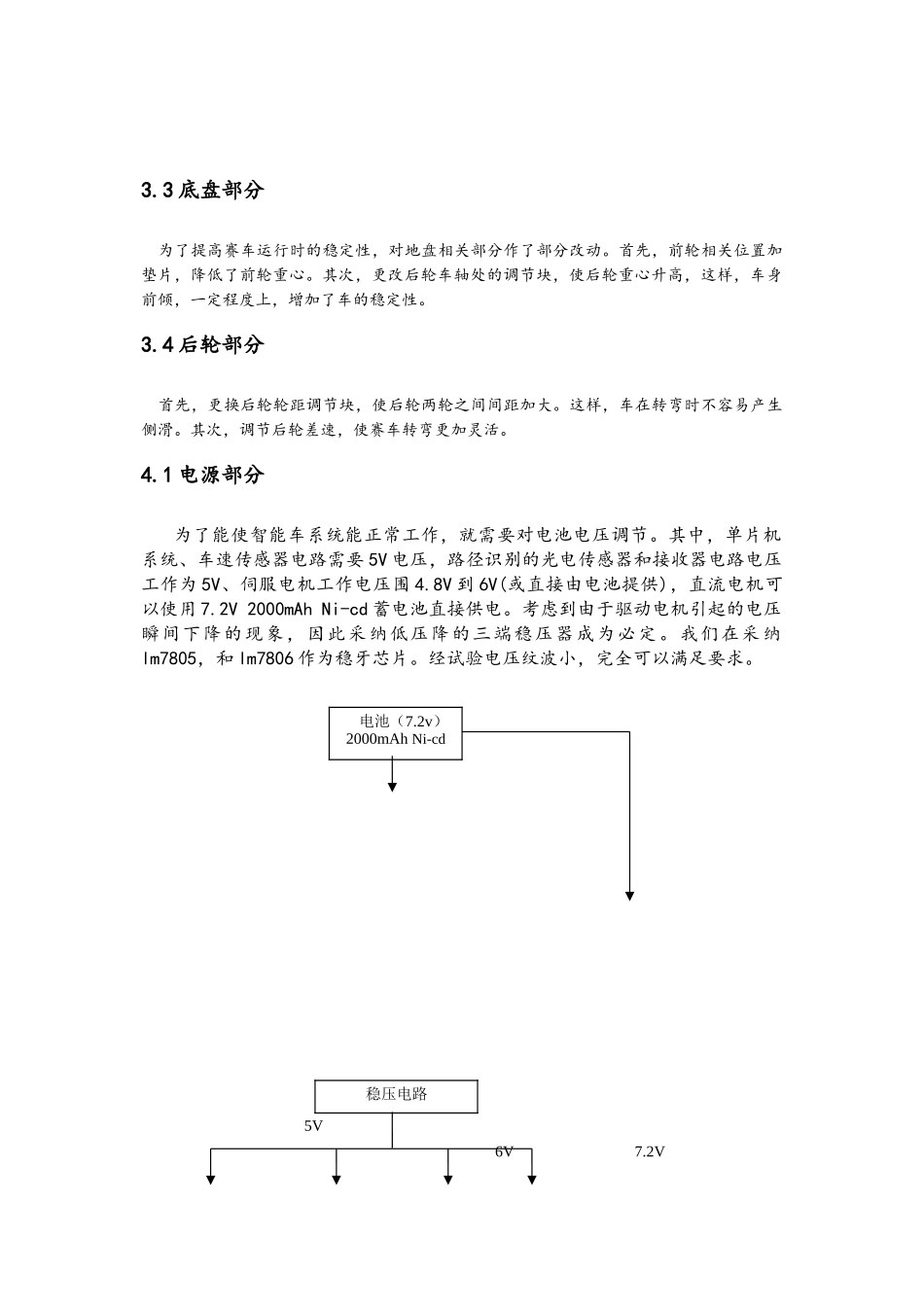
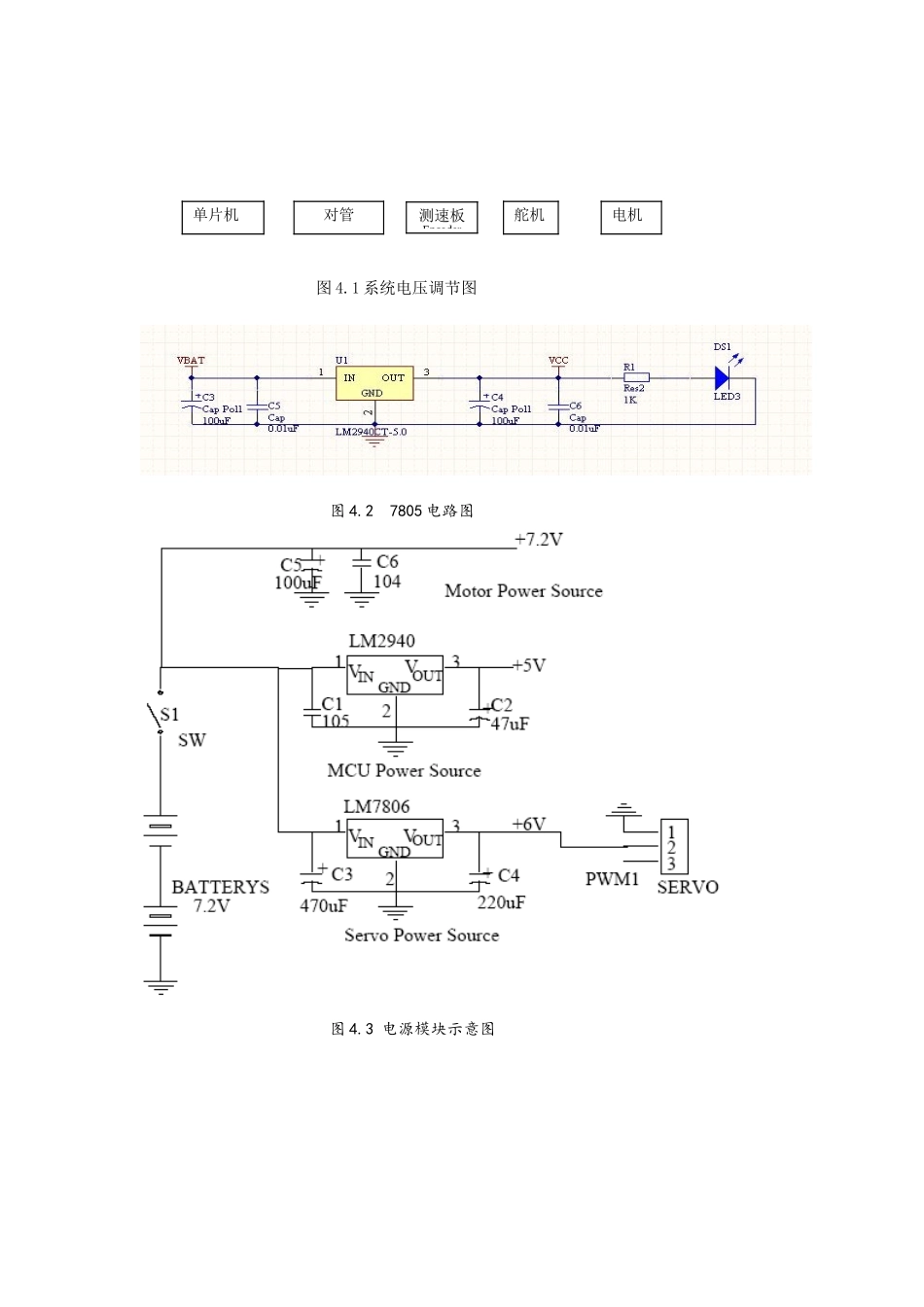
系统采纳采纳了 7
2V 2000mAh Ni-Cd 蓄电池作为系统能源,并且通过稳压电路分出 6 伏,5 伏已分别给舵机和单片机供电
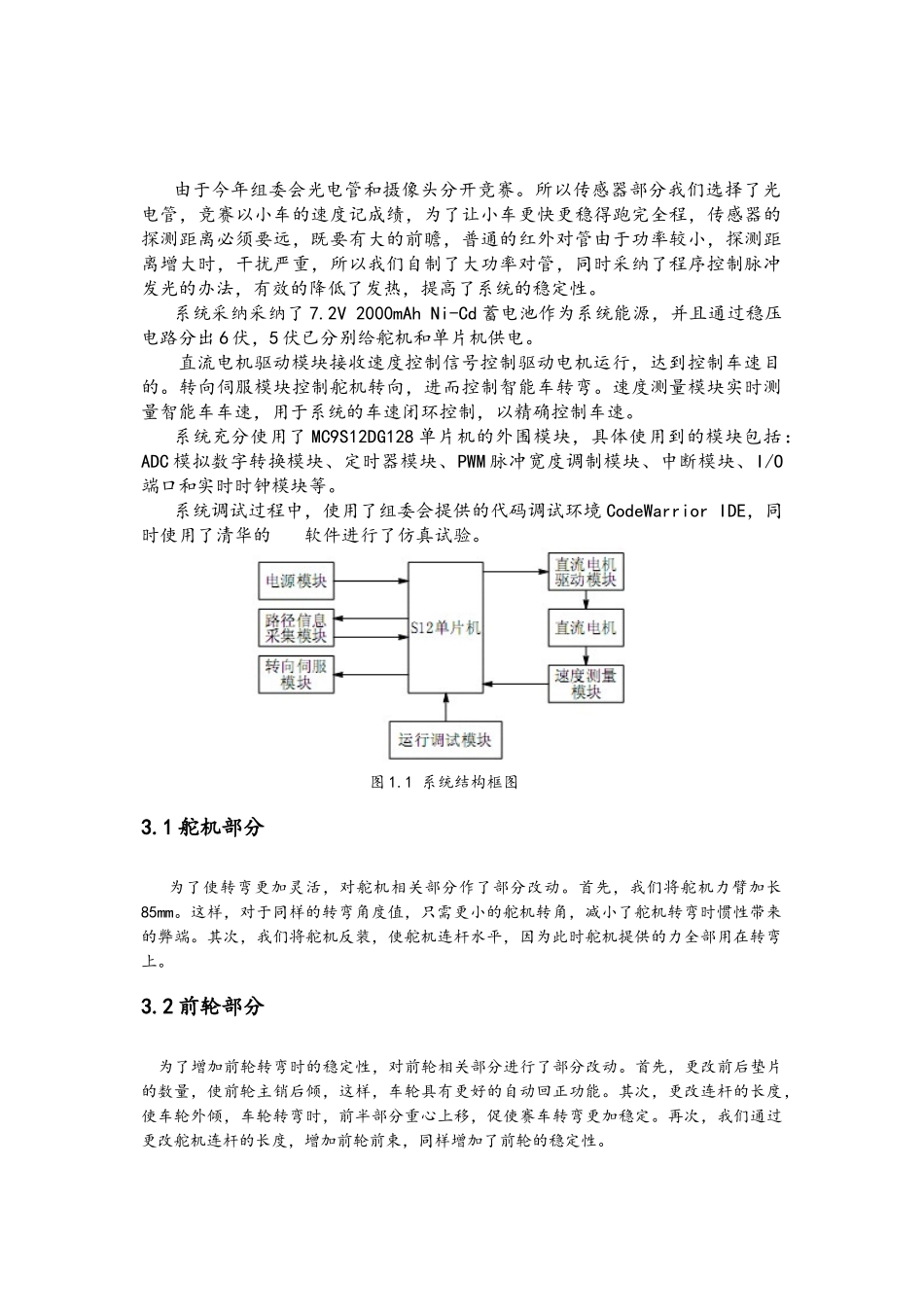
直流电机驱动模块接收速度控制信号控制驱动电机运行,达到控制车速目的
转向伺服模块控制舵机转向,进而控制智能车转弯
速度测量模块实时测量智能车车速,用于系统的车速闭环控制,以精确控制车速
系统充分使用了 MC9S12DG128 单片机的外围模块,具体使用到的模块包括:ADC 模拟数字转换模块、定时器模块、PWM 脉冲宽度调制模块、中断模块、I/O端口和实时时钟模块等
系统调试过程中,使用了组委会提供的代码调试环境 CodeWarrior IDE,同时使用了清华的软件进行了仿真试验
1 系统结构框图3
1 舵机部分 为了使转弯更加灵活,对舵机相关部分作了部分改动
首先,我们将舵机力臂加长85mm
这样,对于同样的转弯角度值,只需更小的舵机转角,减小了舵机转弯时惯性带来的弊端
其次,我们将舵机反装,使舵机连杆水平,因为此时舵机提供的力全部用在转弯上
2 前轮部分 为了增加前轮转弯时的稳定性,对前轮相关部分进行了部分改动
首先,更改前后垫片的数量,使前轮主销后倾,这样,车轮具有更好的自动回正功能
其次,更改连杆的长度,使车轮外倾,车轮转弯时,前半部分重心上移,促使赛车转弯更加稳定
再次,我们通过更改舵机连杆的长度,增加前轮前束,同样增加了前轮的稳定性
3 底盘部分 为了提高赛车运行时的稳定性,对地盘相关部分作了部分改动