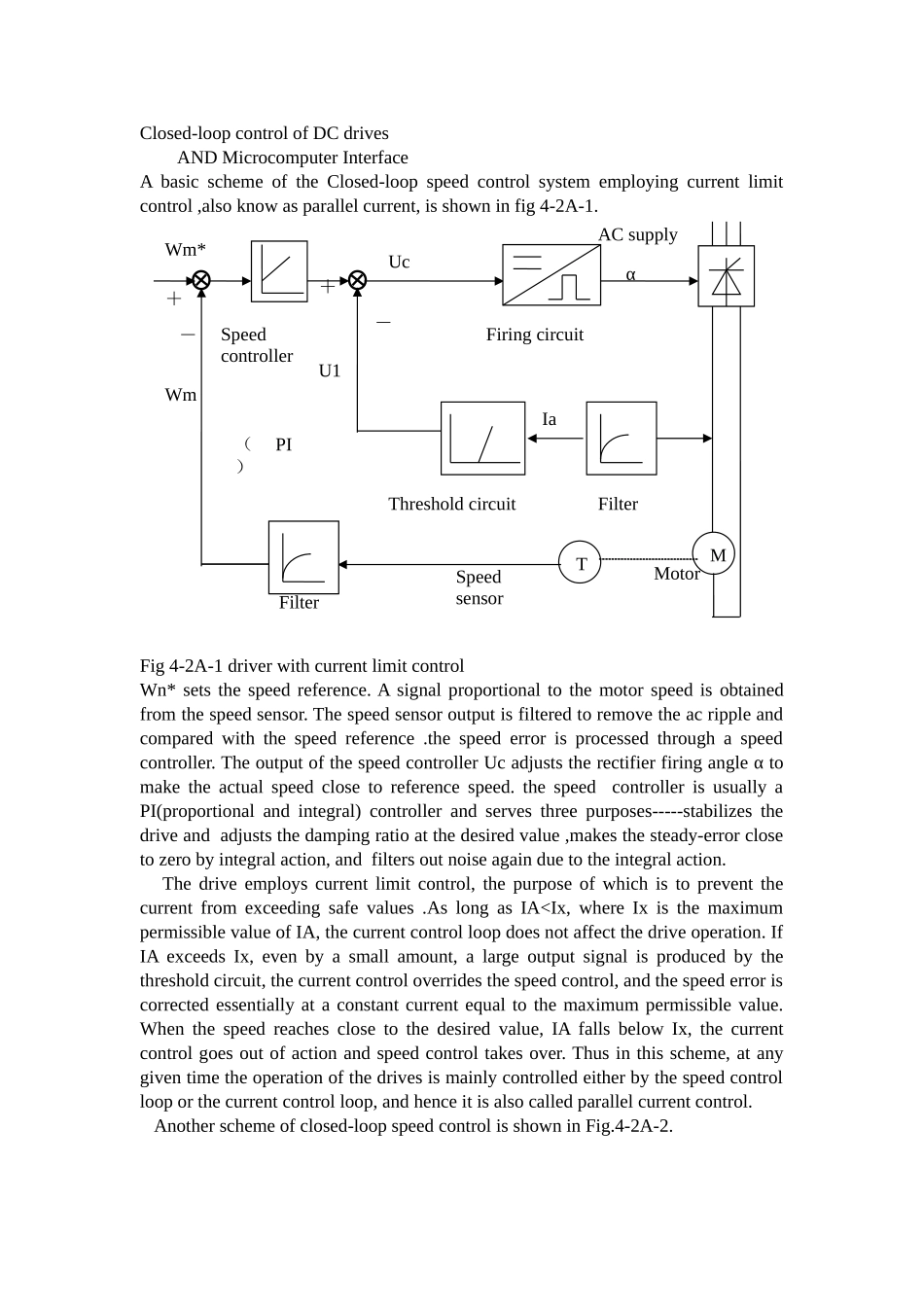
Closed-loop control of DC drives AND Microcomputer InterfaceA basic scheme of the Closed-loop speed control system employing current limit control ,also know as parallel current, is shown in fig 4-2A-1
Fig 4-2A-1 driver with current limit controlWn* sets the speed reference
A signal proportional to the motor speed is obtained from the speed sensor
The speed sensor output is filtered to remove the ac ripple and compared with the speed reference
the speed error is processed through a speed controller
The output of the speed controller Uc adjusts the rectifier firing angle α to make the actual speed close to reference speed
the speed controller is usually a PI(proportional and integral) controller and serves three purposes-----stabilizes the drive and adjusts the damping ratio at the des