基于拉格朗日方程得苹果采摘机械手得力学分析摘要目前由于果蔬采摘得复杂性,采摘自动化程度仍然很低,国内采摘作业基本上就是依靠手工完成
进入21世纪,世界各国均面临老龄化问题,所需得劳动力不仅成本高,而且效率也不高,因此进展机械化收获技术,讨论开发果蔬采摘机器人,具有重要得意义
国内外对于果蔬采摘机器人仍处于讨论开发设计阶段,要走得路还很长,主要原因之一就是机器人具体得讨论与设计与分析存在不足
针对现有得主要结构设计上得不足,本文以苹果为采摘对象,对苹果采摘机器人机械手进行了结构设计与分析
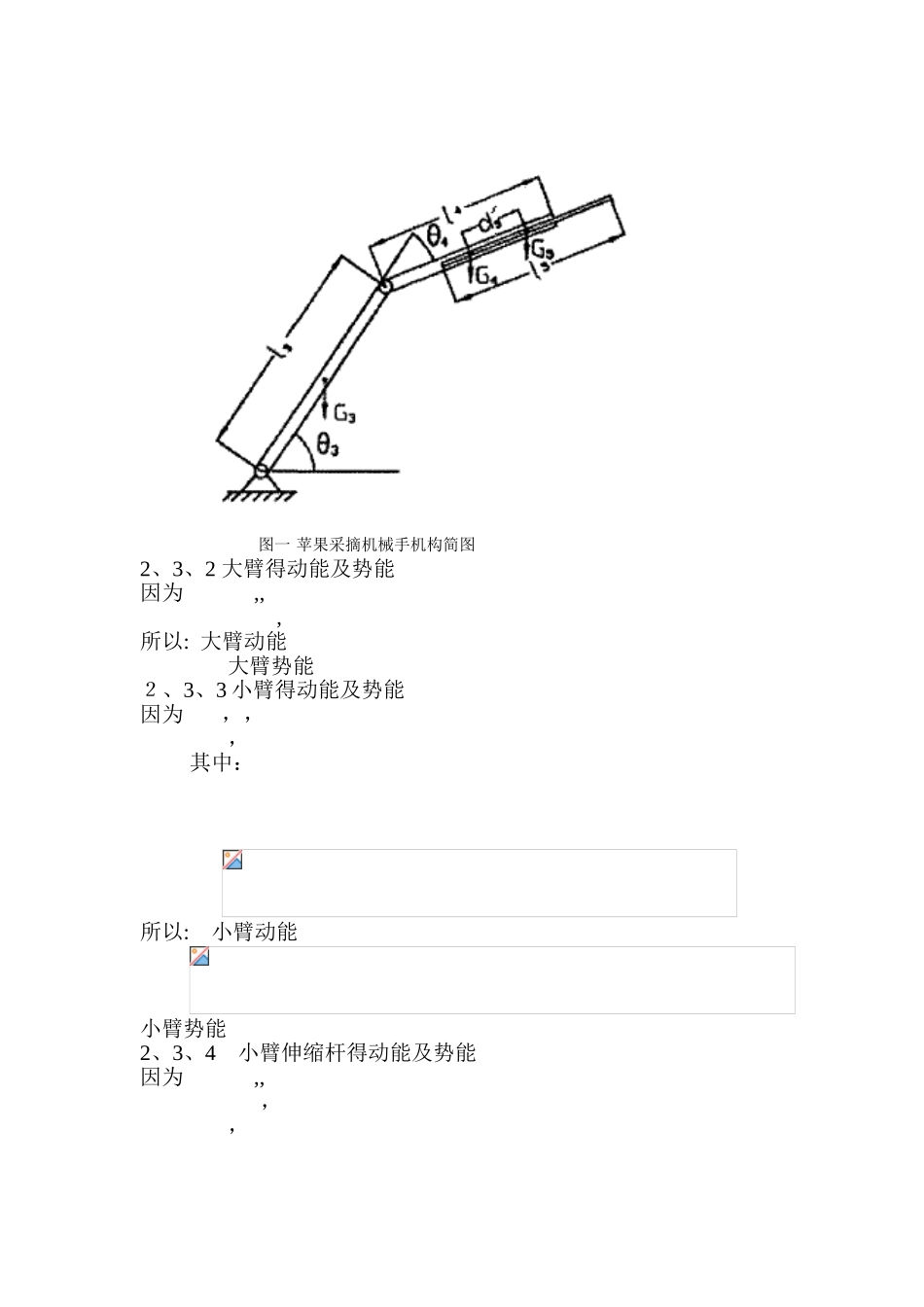
通过了解与学习国内外苹果采摘机器人机械手得设计与分析,基于苹果采摘机器人机械手得所需完成得功能原则,提出了一种具有整体升降与小臂伸缩功能得三自由度苹果采摘机械手,建立苹果采摘机械手得简易模型,画出相应得结构简图,对各个构件进行逐步受力分析,利用拉格朗日方程建立采摘机器人机械手力学方程并求解模型
【关键词】:机械手 拉格朗日方程 动力学 一
概述:进入 2 1世纪,随着工业得迅速进展,世界各国均面临人口老龄化问题,农业劳动力逐渐向其她行业转移,劳动力不仅成本高而且还不容易得到
而果蔬采摘作业就是果蔬生产中最耗时、最费劲得一个环节,其收获又属于劳动密集型作业,随着人们生活质量得不断提高,人们也急需要从这种高强度高危险性得劳动中解脱出来
因此实现果蔬收获得机械化变得越来越迫切,讨论农业果实采摘机器人具有重要得意义
二.模型得建立及其求解2、1 模型建立得准备:随着多自由度系统得广泛应用,其动力学分析也成为多自由度机械系统设计得—个重要组成部分
在单自由度机械系统中,由于只有一个自由度,可以把机构简化为—个具有等效质量或等效转动惯量得等效构件,再求出作用在等效构件上得等效力与等效力矩
对于多自由度系统,则不能按其自由度简单地简化为互不相干得等效构件
牛顿第二运动定律就是讨论动力学得基础
用其进行动力