矢量控制系统仿真课程设计 初始条件:根据转差频率矢量控制系统原理图设计对应得sim ul i nk 仿真模型,电机参数为:额定功率 pow e r=2、2K W,线电压,额定频率;定子电阻,漏感;转子电阻,漏感;互感,转动惯量,极对数,其余参数为0
要求完成得主要任务: (1)用 MATLAB 建立矢量控制系统仿真模型;(2)根据仿真结果分析起动时定子电流励磁重量与转矩重量;(3)根据仿真结果分析起动时转速与转子磁链
摘 要因为异步电动机得物理模型就是一个高阶、非线性、强耦合得多变量系统,需要用一组非线性方程组来描述,所以控制起来极为不便
异步电机得物理模型之所以复杂,关键在于各个磁通间得耦合
假如把异步电动机模型解耦成有磁链与转速分别控制得简单模型,就可以模拟直流电动机得控制模型来控制沟通电动机
直接矢量控制就就是一种优越得沟通电机控制方式,它模拟直流电机得控制方式使得沟通电机也能取得与直流电机相媲美得控制效果
本文讨论了矢量控制系统中磁链调节器得设计方法
并用 M AT LAB 最终得到了仿真结果
关键词:矢量控制 非线性 MA TLAB 仿真 矢量控制系统仿真1设计条件及任务1、1 设计条件 根据转差频率矢量控制系统原理图设计对应得si mu l ink 仿真模型,电机参数为:额定功率 power=2、2 KW,线电压,额定频率;定子电阻,漏感;转子电阻,漏感;互感,转动惯量,极对数,其余参数为 0
1、2 设计任务(1)用 M A T L AB 建立矢量控制系统仿真模型;(2)根据仿真结果分析起动时定子电流励磁重量与转矩重量;(3)根据仿真结果分析起动时转速与转子磁链
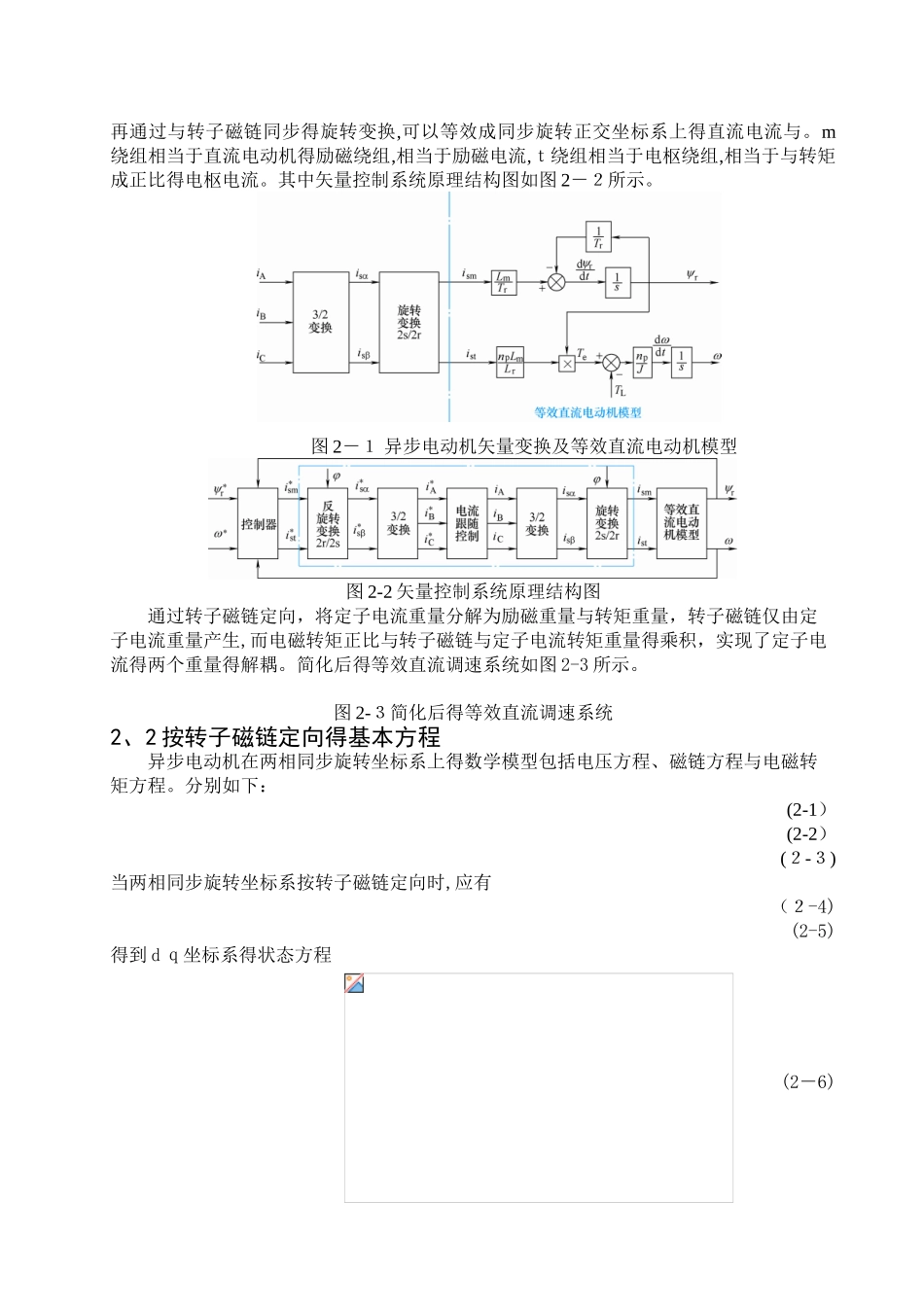
2 异步电动机矢量控制原理及基本方程式2、1 矢量控制基本原理 矢量控制系统得基本思路就是以产生相同得旋转磁动势为准则,将异步电动机在静止三相坐标系上得定子沟通电流通过坐标变换等效成同步旋转坐标系上