毕 业论 文鉴 定 书设 计题目:简易机械手的 PLC 控制程序 院(系)汕头大学继续教育学院专业班级夜大 09 机电一体化(电气)(专科)1班姓 名 学 号 完成日期: 2025 年 3 月 5 日简易机械手的 PLC 控制程序内容摘要本设计利用 PLC 控制程序调试,能够完成机械手的下降,夹紧,上升,右移,下降,松开,上升,左移等一系列的动作,完全符合现实工业生产的需要,经触摸屏模拟调试效果良好,其连续性运行或手动的操作都符合要求,整个程序符合自动化的生产的要求
本文配有动作示意图,I/O 分配表,I/O 连接图,梯形图和触摸屏画面,同时有程序的详细分析
关键词:机械手 自动化 可编程控制器 PLC 触摸屏概述机电一体化在各个领域的应用,机械设备的自动控制成分显来越来越重要,大机械手是一种模仿人体上肢运动的机器,它能根据预定要求输送工种或握持工具进行操作的自动化技术设备,对实现工业生产自动化,推动工业生产的进一步进展起着重要作用
本设计采纳 PLC 作为控制机对工业机械手进行控制及监控
它能根据生产工艺的要求,遵循一定的程序、时间和位置来完成工件的传送和装卸 ,从而大大改善工人的劳动条件,显著地提高劳动生产率工业机械手可以代替人手的繁重劳动,显著减轻工人的劳动强度,提高 劳动生产率和自动化水平
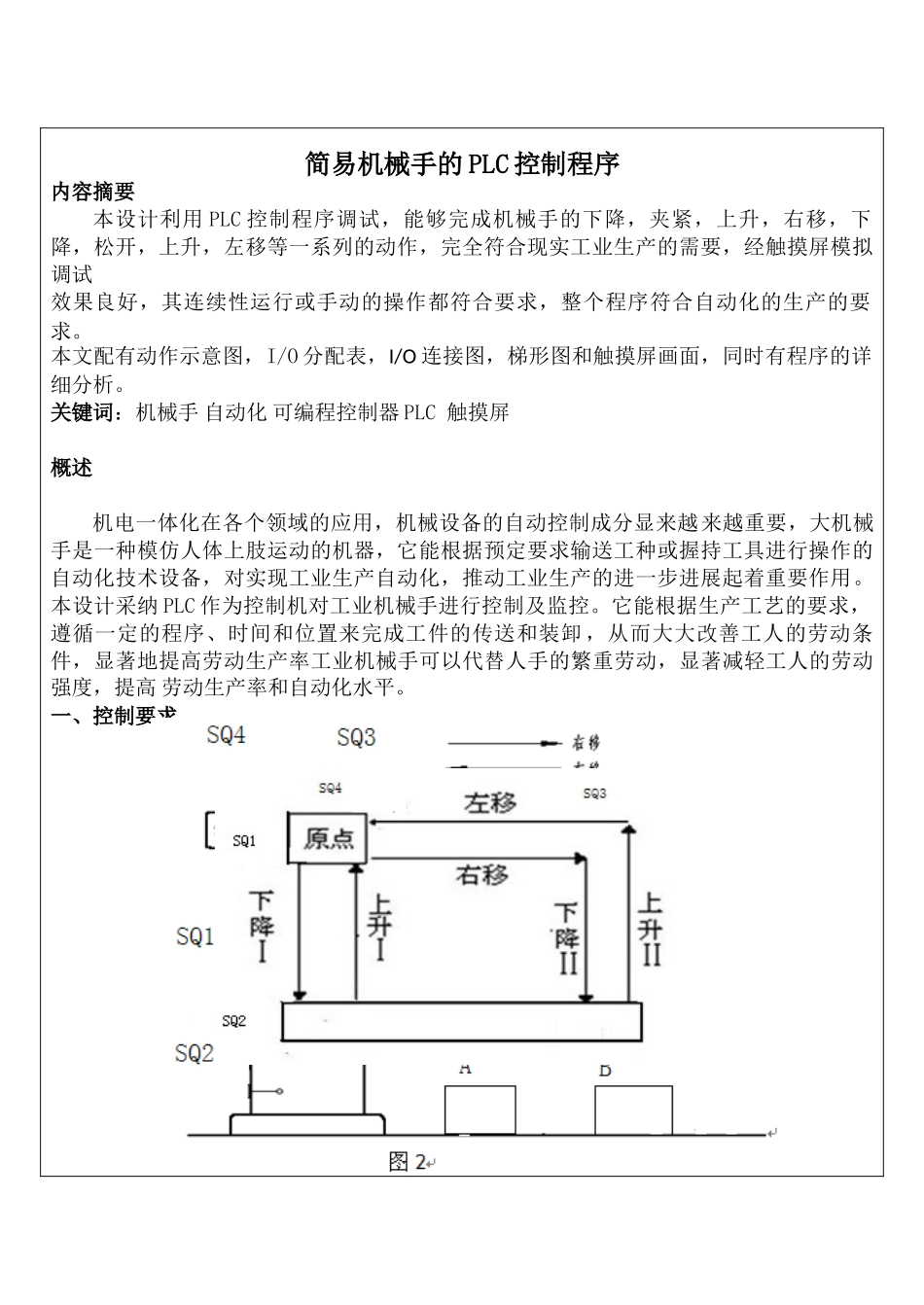
一、控制要求 图 1如图所示是一台机械手传送工件机械运动状态示意图,其作用是将工件从A点传递到B点
机械手的初始置位停在原点,按下启动后按钮后,机械手将下降—夹紧工件延时 2 秒-上升-右移-再下降-放松工件延时 2 秒-再上升-左移完成一个工作周期
机械手的下降、上升、右移、左移等动作转换,是由相应的动作开关来控制的,而夹紧和放松的转换是有时间来控制的气动机械手的升降和左右移行作分别由两个具有双线圈的两位电磁阀驱动气缸来完成,其中下降与上升对应电磁阀的线圈分别为 YV3 与