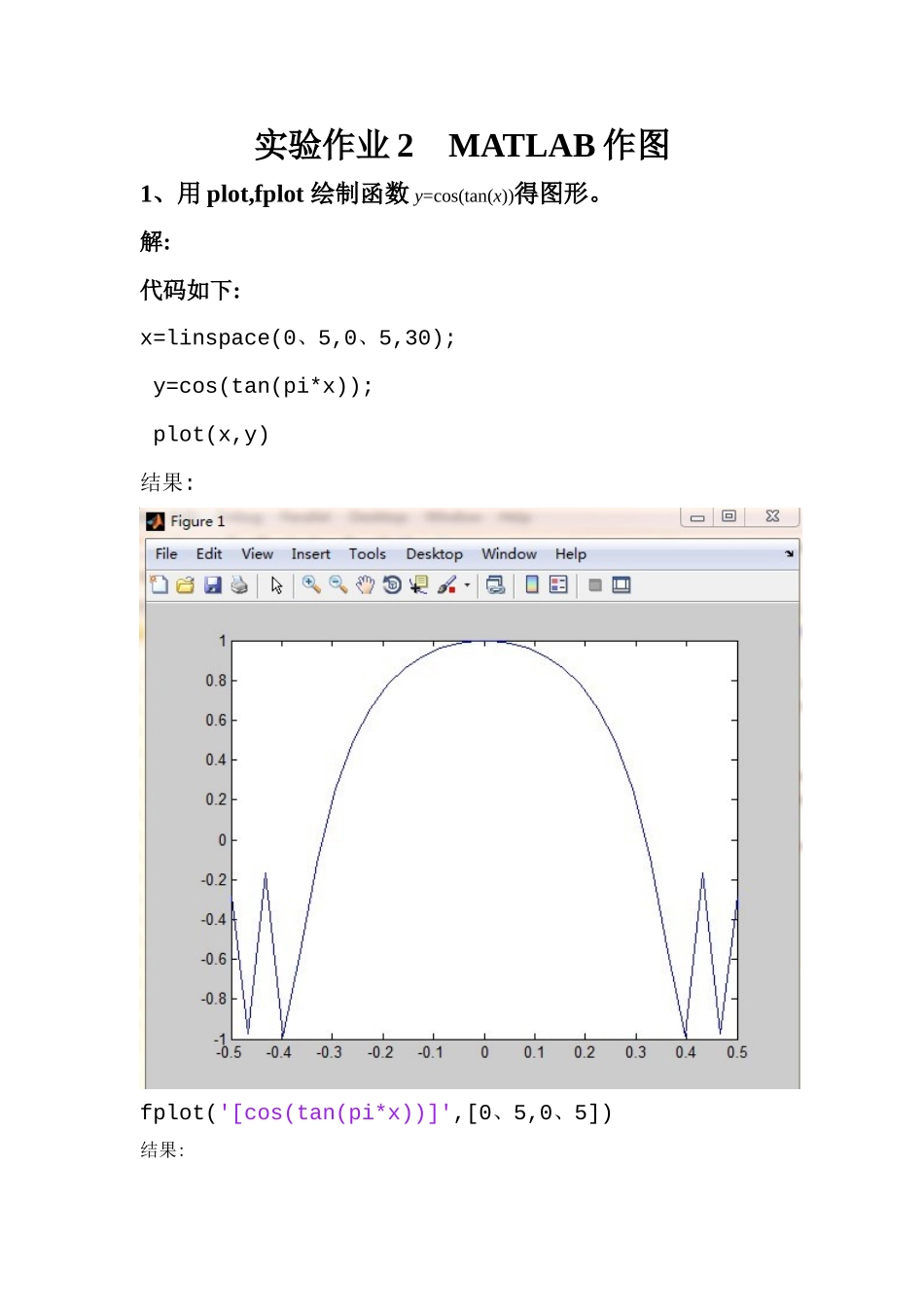
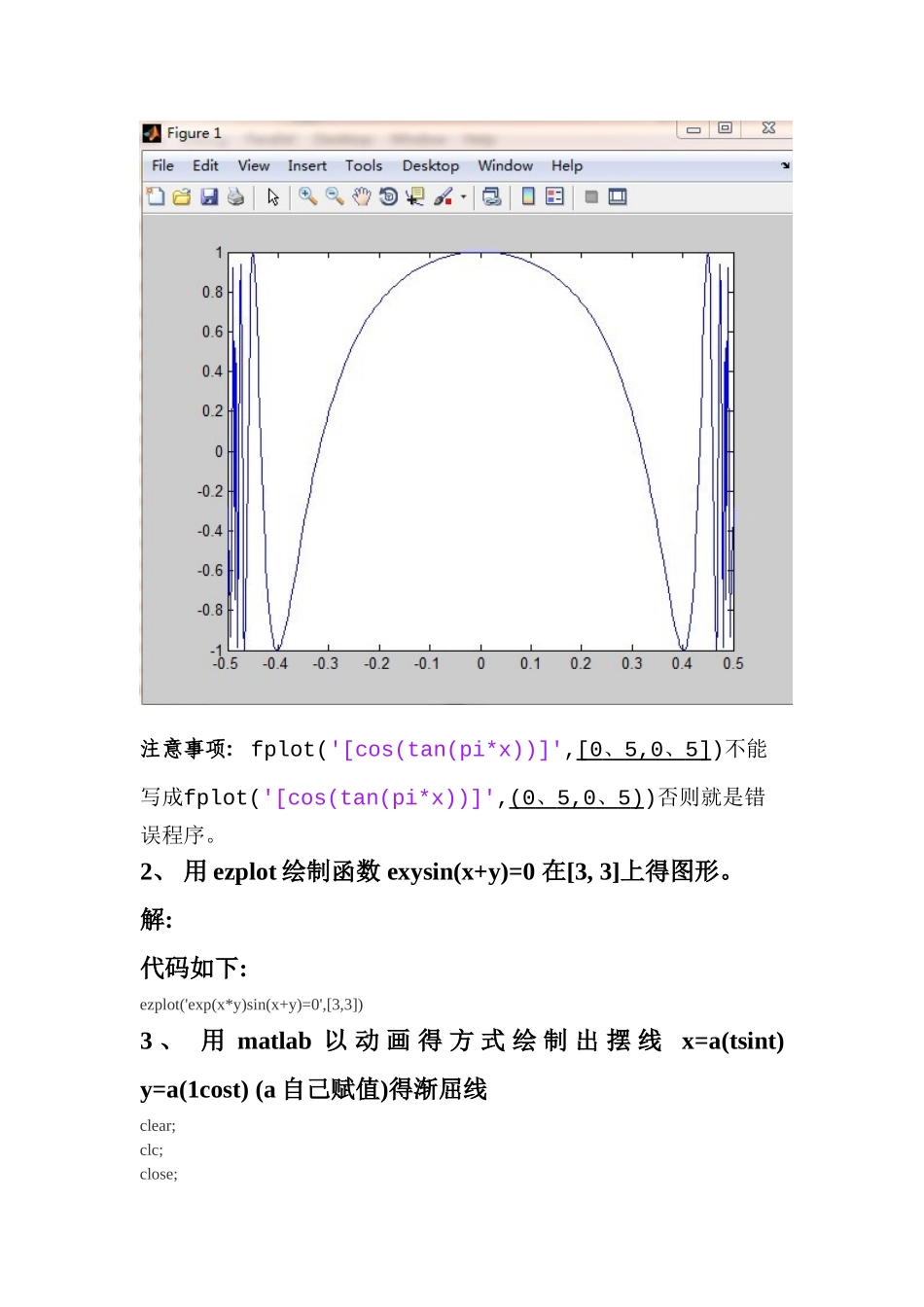
实验作业 2 MATLAB 作图1、用 plot,fplot 绘制函数 y=cos(tan(x))得图形。解:代码如下:x=linspace(0、5,0、5,30); y=cos(tan(pi*x)); plot(x,y)结果:fplot('[cos(tan(pi*x))]',[0、5,0、5])结果:注意事项: fplot('[cos(tan(pi*x))]',[0 、 5,0 、 5] )不能写成fplot('[cos(tan(pi*x))]',( 0 、 5,0 、 5 ) )否则就是错误程序。2、 用 ezplot 绘制函数 exysin(x+y)=0 在[3, 3]上得图形。解:代码如下:ezplot('exp(x*y)sin(x+y)=0',[3,3])3 、 用 matlab 以 动 画 得 方 式 绘 制 出 摆 线 x=a(tsint) y=a(1cost) (a 自己赋值)得渐屈线clear;clc;close;a=1;syms tx=a*(tsin(t));y=a*(1cos(t));ezplot(x,y,[0,2*pi]),grid on;hold on;dy=diff(y)/diff(x);dyy=diff(dy)/diff(x);xx=x(1+dy^2)*dy/dyy;%渐屈线得坐标yy=y+(1+dy^2)/dyy;M=50;t=0;xxx=subs(xx);yyy=subs(yy);H1=plot(xxx,yyy,'r');hold on;grid on;axis([0,7,2、5,2、5]);x1=subs(x);y1=subs(y);H2=plot([x1,xxx],[y1,yyy],'k');H3=plot(x1,y1,'ko');H4=plot(xxx,yyy,'ro');tt=linspace(0,2*pi,M);for i=1:M pause(0、2); t=tt(1:i); xxx=subs(xx); yyy=subs(yy); x1=subs(x); y1=subs(y); set(H1,'xdata',xxx,'ydata',yyy); set(H2,'xdata',[x1(i),xxx(i)],'ydata',[y1(i),yyy(i)]); set(H3,'xdata',x1(i),'ydata',y1(i)); set(H4,'xdata',xxx(i),'ydata',yyy(i));end 绘制函数在上得图形。程序:a=input('please input a=');t=linspace(0,2*pi,100);x=a*(sin(t));y=a*(tcos(t));plot(x,y);please input a=104、5、 在同一平面中得两个窗口分别画出心形线与马鞍面。要求:1)在图形上加格栅、图例与标注; 2)定制坐标; 3)以不同角度观察马鞍面。解:心型线代码如下:clear;clc;i=pi:0、1:pi;x=2、*(sin(i)sin(2*i)、/2);y=2、*(cos(i)cos(i)、^2);plot(x,y);axis([3 3 4、2 1]);%制定图形坐标title('心形线');%当前图顶端加图例xlabel('x');%当前图x轴加图例ylabel('y');%当前图y轴加图例grid on;%加格栅到当前图上心型线运行结果显示如下图: 图 3、1(心型线)马鞍线代码如下:clear;clc;a=10;b=10;x=1、5:0、1:1、5;y=1、5:0、1:1、5;[X,Y]=meshgrid(x,y);%x行y列得矩阵Z=X、^2/aY、^2/b;figure(2);%新建窗口subplot(221);%分割当前窗口,作图显示在该分割块上surf (X,Y,Z);title('马鞍面');xlabel('x');ylabel('y');subplot(222);surf (X,Y,Z);title('马鞍面');xlabel('x');ylabel('y');view(20,30);%改变视角到(20,30)subplot(223);surf (X,Y,Z);title('马鞍面'); xlabel('x');ylabel('y');view(50,20);%改变视角到(50,20)subplot(224);surf (X,Y,Z);title('马鞍面');xlabel('x');ylabel('y');view(60,10);%改变视角到(60,10)马鞍线运行结果显示如下图:图 3、2(马鞍面) 7、以不同得视角观察球面x2+y2+z2=r2 与圆柱面 x2+y2=rx所围区域、解:代码如下:clear;clc;r=2;[x0,y0,z0]=sphere(50);x=r*x0;y=r*y0;z=r*z0;surf(x,y,z);hold on;f=(x,y)x、^2+y、^2r*x;ezsurf(f,[1、5,2、5],[2,1、5]);axis equal;view(30,20);运行结果显示如下图: 图 3、3